Analyse des SLIT via la Transformée de Laplace
Après avoir décrit les SLIT à l’aide d’équations différentielles et de convolutions, ce chapitre présente un outil puissant pour résoudre et analyser ces systèmes: la transformée de Laplace.
Transformée de Laplace
Définition
La transformée de Laplace est une transformation qui convertit une fonction temporelle en une fonction dépendante d'une variable complexe
où
Exemple : fonction échelon
A titre d'exemple, nous allons déterminer la transformée de Laplace de la fonction échelon unitaire
L'intégrale de
Nous évaluons cette expression aux bornes de
- Lorsque
, si . - Lorsque
, .
Pour
Propriétés
La transformée de Laplace possède plusieurs propriétés. Ces propriétés permettent de simplifier l'analyse des systèmes linéaires et invariants dans le temps.
1. Linéarité
La transformée de Laplace est une opération linéaire :
où
Démonstration
Pour démontrer cette propriété, nous devons appliquer la définition de la transformée de Laplace à la fonction
2. Dérivation
La transformée de Laplace de la dérivée d'une fonction est donnée par :
où
Lorsque toutes les conditions initiales sont nulles,
Démonstration
Nous allons démontrer ici la propriété pour
La transformée de Laplace de
En utilisant l'intégration par parties, avec
Ainsi, l'intégration par parties donne :
Évaluons le premier terme
- À
, si ne croît pas plus vite qu'une exponentielle, . - À
, .
Donc :
Ainsi, nous avons :
Donc :
3. Intégration
La transformée de Laplace de l'intégrale d'une fonction est donnée par :
4. Théorème du décalage dans le temps
Si une fonction
où
Démonstration
Nous voulons trouver la transformée de Laplace de
Comme
Pour simplifier cette intégrale, nous faisons un changement de variable. Posons
Nous pouvons séparer le facteur exponentiel en deux termes :
Comme
L'intégrale
5. Multiplication par une exponentielle
La multiplication d'une fonction par une exponentielle se traduit par un décalage dans le domaine de la transformée de Laplace :
6. Théorème de convolution
La transformée de Laplace de la convolution de deux fonctions est le produit des transformées de Laplace de ces fonctions :
où
7. Valeur initiale et valeur finale
- Théorème de la valeur initiale :
- Théorème de la valeur finale :
Analyse des SLIT
Hypothèses
Considérons un SLIT d'ordre
Conditions Initiales Nulles
Considérons également que les conditions initiales sont nulles c-à-d:
- l'entrée et la sortie sont initialement nulles en
:
- les dérivées
ieme de l'entrée et de la sortie sont nulles en pour tout ,
Fonction de transfert
La fonction de transfert d'un Système Linéaire Invariant dans le Temps (SLIT) est une représentation fondamentale qui relie la sortie du système à son entrée dans le domaine de Laplace. Elle est définie comme le rapport de la transformée de Laplace de la sortie à la transformée de Laplace de l'entrée, en supposant des conditions initiales nulles.
En appliquant la transformée de Laplace aux deux côtés de l'équation différentielle et en utilisant les propriétés de linéarité et de différentiation de la transformée de Laplace, nous obtenons :
et après factorisation :
La fonction de transfert
Cette fonction de transfert caractérise complètement le comportement du SLIT dans le domaine de Laplace. L'expression sous la forme d'un ratio de deux polynômes correspond à la représentation sous forme polynomiale de la fonction de transfert.
Exemple: fonction de transfert de premier ordre
A titre d'illustration, nous allons déterminer la fonction de transfert d'un système de premier ordre modélisé par l'équation différentielle suivante:
où :
est la constante de temps du système, est le gain statique du système.
Pour trouver la fonction de transfert, nous appliquons la transformée de Laplace aux deux côtés de l'équation en supposant des conditions initiales nulles (c'est-à-dire
En utilisant la propriété de la transformée de Laplace de la dérivée, nous avons :
Nous pouvons maintenant isoler
La fonction de transfert
Forme Factorisée
En déterminant les racines des polynômes au numérateur et au dénominateur, nous pouvons obtenir une representation sous forme factorisée de la fonction de transfert :
où :
sont les zéros du système, sont les pôles du système, est un facteur de gain.
Type du Système
Le type du système est un indicateur du nombre d’intégrateurs présents dans la chaîne directe du système, c’est-à-dire du nombre de pôles situés à l’origine du plan complexe.
Si une fonction de transfert possède
On dit alors que le système est de type
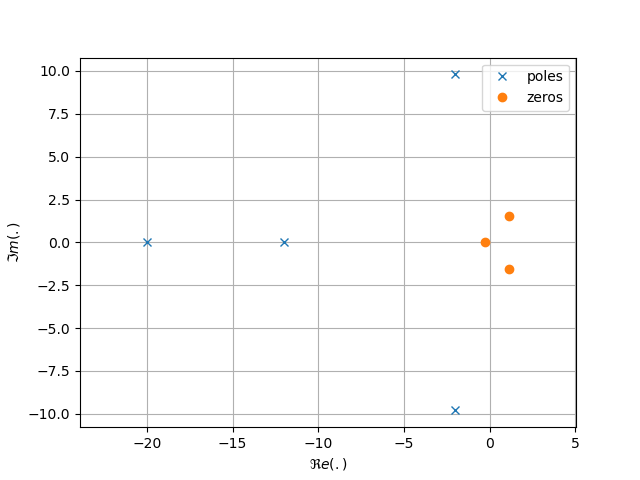
Représentation
Graphiquement, il est courant de représenter les pôles et les zéros dans le plan complexe via la représentation des pôles et zéros. La représentation des pôles et zéros sur le plan complexe permet d’analyser rapidement le comportement d’un système dynamique. Les pôles sont représentés par des croix
Lien avec la Réponse Impulsionnelle
La réponse impulsionnelle
La fonction de transfert correspond donc à la transformée de Laplace de la réponse impulsionnelle.
Réponse temporelle à une entrée quelconque
Pour déterminer la réponse temporelle du système à une entrée quelconque
- Obtention de la fonction de transfert du système
- Détermination de la transformée de Laplace de l'entrée:
- Détermination de la transformée de Laplace de la sortie:
- Calcul de la transformée de Laplace inverse de la sortie:
.
Pour l'étape 4, nous utiliserons le plus souvent la table des transformée de Laplace. Pour obtenir une forme présente dans la table, il est classique de recourir à une décomposition en éléments simples.
Stabilité
Les pôles correspondent simplement aux racines de l'équation caractéristique du système. Du coup, un système est BIBO stable si est seulement si tous ses pôles possèdent une partie réelle négative c-à-d
Valeur Finale
Lorsqu'un système est stable, sa réponse indicielle pour un échelon d'amplitude
Démonstration
Lorsque l'entrée est un échelon d'amplitude
En utilisant le théorème de la valeur finale, nous obtenons
Réponse Fréquentielle
Lorsque l'entrée du système est une exponentielle complexe de pulsation
Pour un système causal (
TIP
Pour obtenir la réponse fréquentielle à partir de la fonction de transfert, il suffit de poser
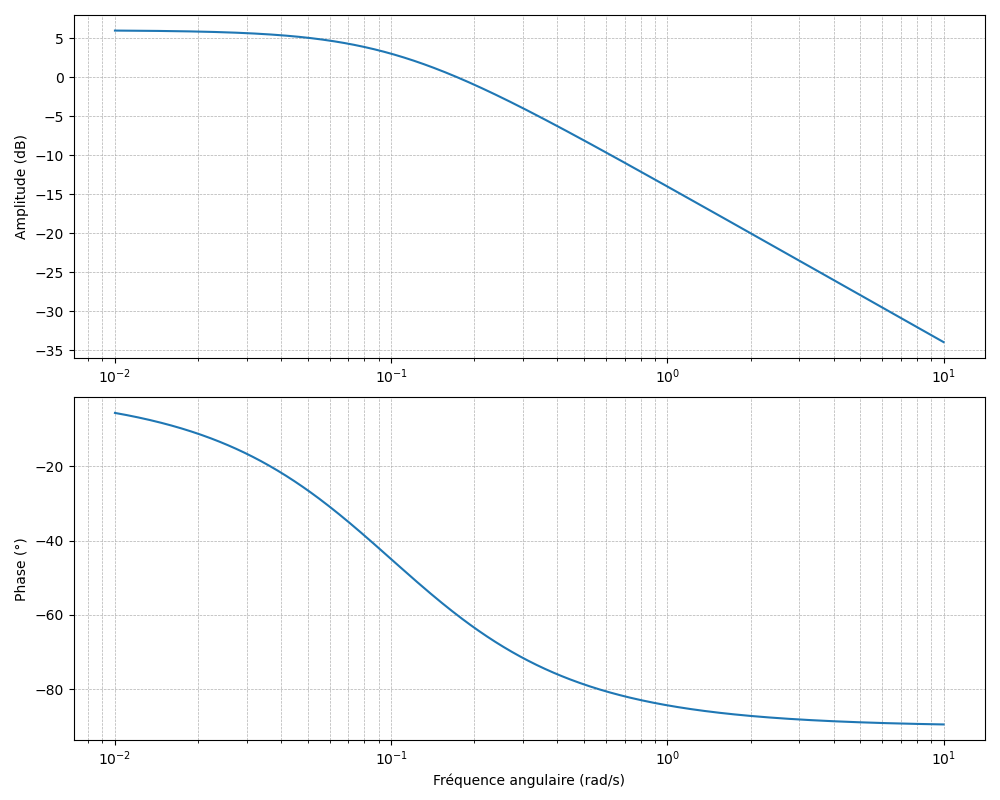
Exemple: Réponse fréquentielle d'un premier ordre
En posant
- Module: Le module de
est donné par :
- Argument: L'argument de
est donné par :
Ce système agit comme un filtre passe-bas, atténuant les hautes fréquences (
Représentation
La réponse fréquentielle est généralement un complexe. Il est courant d'en extraire son module
- Diagramme de Bode :
- Amplitude : Le module
est exprimé en décibels ( ) en fonction de la fréquence (généralement en échelle logarithmique). - Phase : L'argument
est tracé en degrés ou radians en fonction de . - Utilité : Utilisé en électronique et en automatique pour évaluer la stabilité et la bande passante.
- Amplitude : Le module
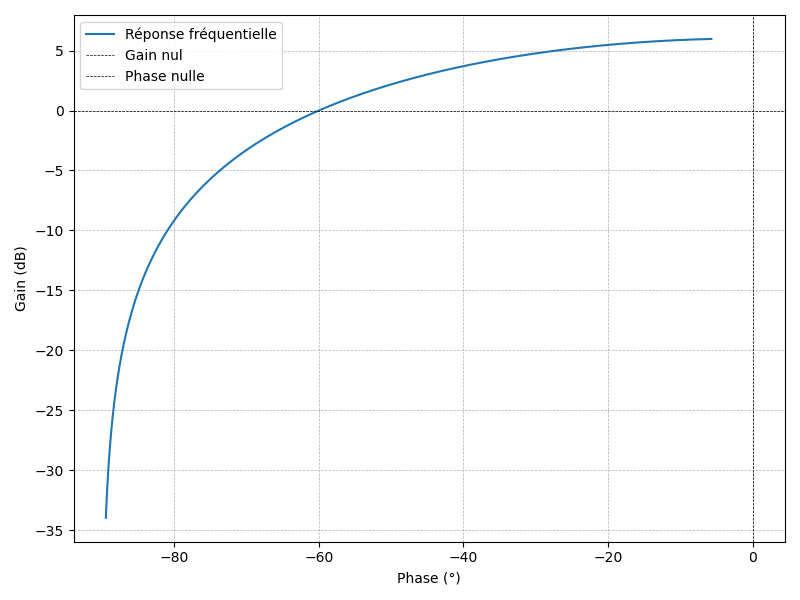
- Diagramme de Black-Nichols :
- Représentation : Combine le gain (en dB) et la phase sur le même graphique (gain sur l’axe vertical, phase sur l’axe horizontal).
- Utilité : Particulièrement utilisé dans la conception de correcteurs
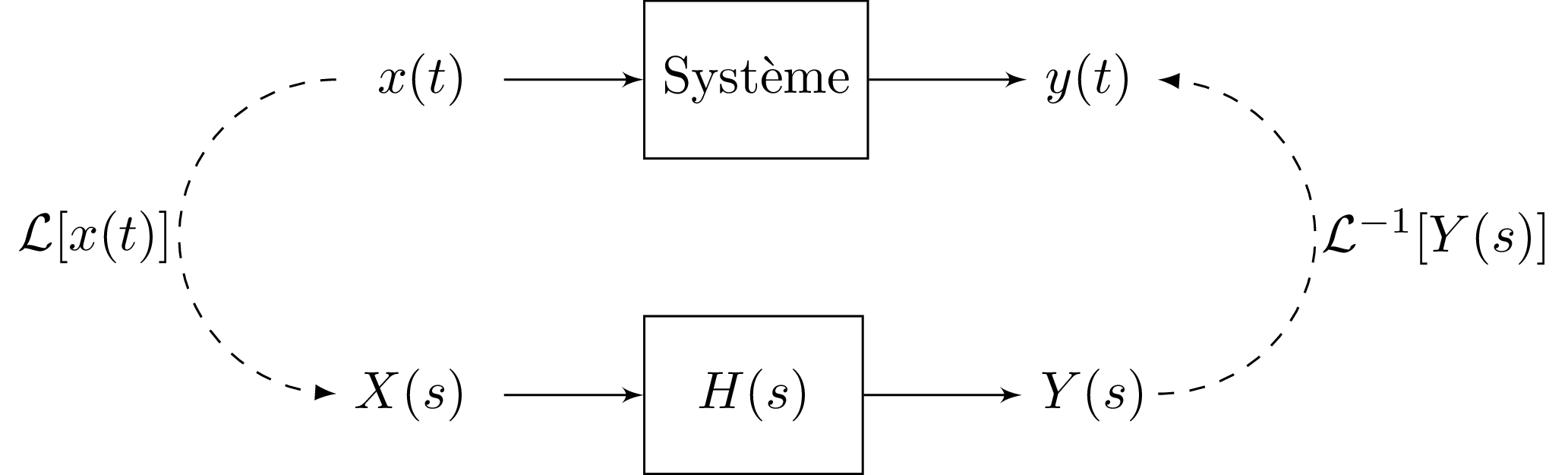
Interconnexion des SLITs
Les SLITs peuvent être interconnectés de différentes manières pour former des systèmes plus complexes. Les configurations les plus courantes incluent la mise en série, la mise en parallèle et les boucles de rétroaction. La transformée de Laplace et les fonctions de transfert facilitent grandement l'analyse de ces interconnexions.
1. Mise en Série (Cascade)

Lorsque deux systèmes sont mis en série, la sortie du premier système devient l'entrée du second. Si
Exemple : mise en série de deux systèmes de premier ordre
Si
2. Mise en Parallèle
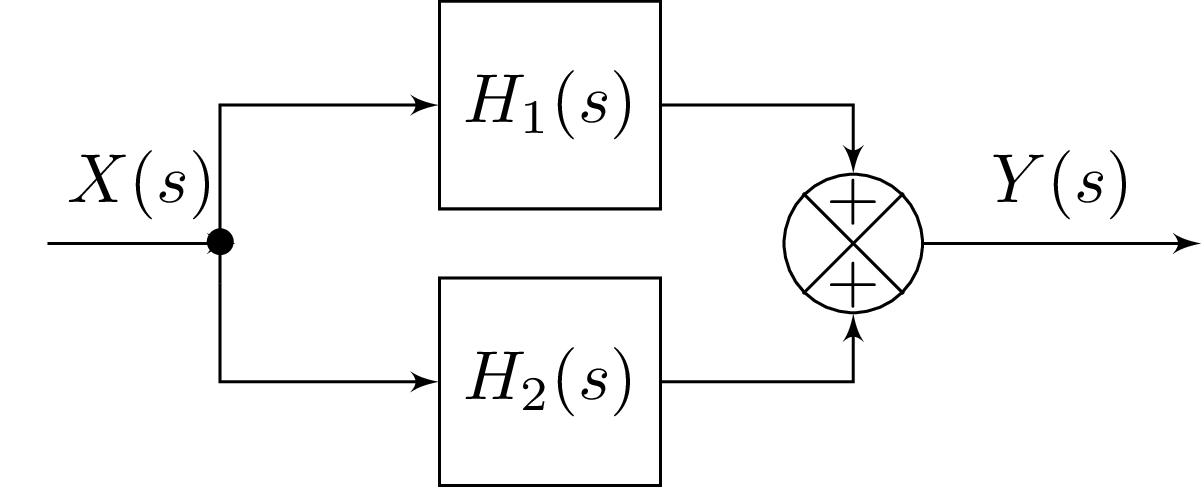
Lorsque deux systèmes sont mis en parallèle, les entrées des deux systèmes sont les mêmes et les sorties sont additionnées. Si
Exemple : mise en parallèle de deux systèmes de premier ordre
Si
3. Boucle Fermée
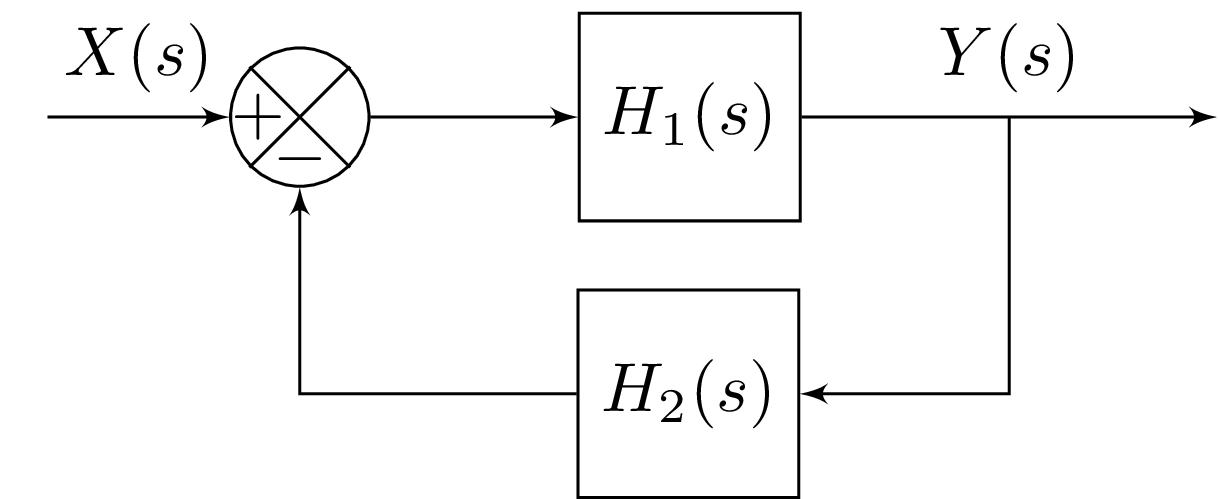
Un système en boucle de rétroaction combine une partie de la sortie avec l'entrée. Il est composé :
- d'une chaîne directe
- d'une chaîne de retour
La fonction de transfert globale du système est donné par:
Démonstration
Notons
En combinant ces deux équations, nous obtenons
La fonction de transfert de la boucle fermée est alors égale à
Exemple : boucle fermée avec deux systèmes de premier ordre
Si