Analyse des Systèmes de Second Ordre
Après avoir étudié les systèmes du premier ordre, nous abordons les systèmes de second ordre, qui décrivent une grande variété de phénomènes physiques (mécaniques, électriques, hydrauliques, etc.). Leur comportement dépend fortement du coefficient d’amortissement
Modélisation d'un système passe-bas (LP)
Equation Différentielle
Pour un système passe-bas d'ordre 2, le lien entre l'entrée et la sortie est donnée par l'équation différentielle suivante:
: gain statique, : facteur (ou coefficient) d'amortissement, : pulsation naturelle (ou propre) (en rad/s).
Notons que certains ouvrages préfèrent utiliser, au lieu du paramètre
Fonction de Transfert
La fonction de transfert d'un système passe-bas de second ordre est donnée par :
Pôles et Zéro
Les pôles
- Régime apériodique (
): Lorsque , le système présente deux pôles réels d'expression :
- Regime critique (
): Lorsque , le système présente un pôle réel double
- Régime pseudo-périodique (
): Lorsque , le système présente une paire de pôles complexes-conjugués
Identification lorsque
Lorsque
Exemple
La figure suivante présente le diagrammes des pôles et des zéros pour 3 systèmes de second ordre avec des coefficients d'amortissement différents.
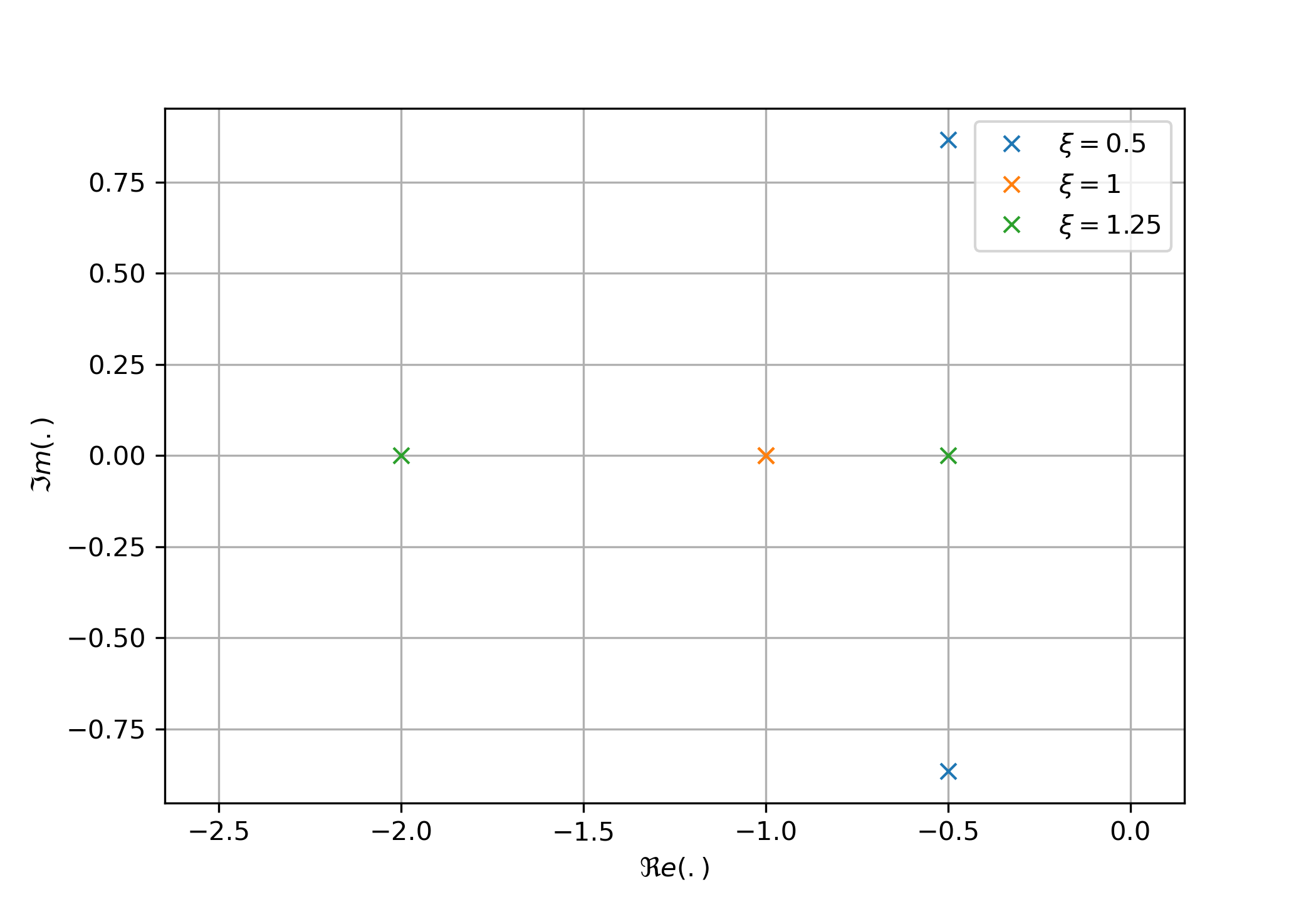
Lorsque
Réponse Indicielle
L'allure de la réponse indicielle est dictée par la géométrie des pôles. Nous obtenons 3 cas de figures.
Regime Apériodique (
Lorsque
avec
Démonstration
Dans le domaine de Laplace, la sortie s'exprime sous la forme :
avec
En utilisant une décomposition en éléments simples, nous obtenons :
avec :
En utilisant la transformée de Laplace inverse, nous obtenons alors :
Il est possible de démontrer les propriétés suivantes:
- Valeur initiale :
, - Valeur finale :
, - Temps de réponse à
: Pas de formule simple, utilisation des abaques. - Pas de dépassement :
.
Pôle dominant
Si
Exemple
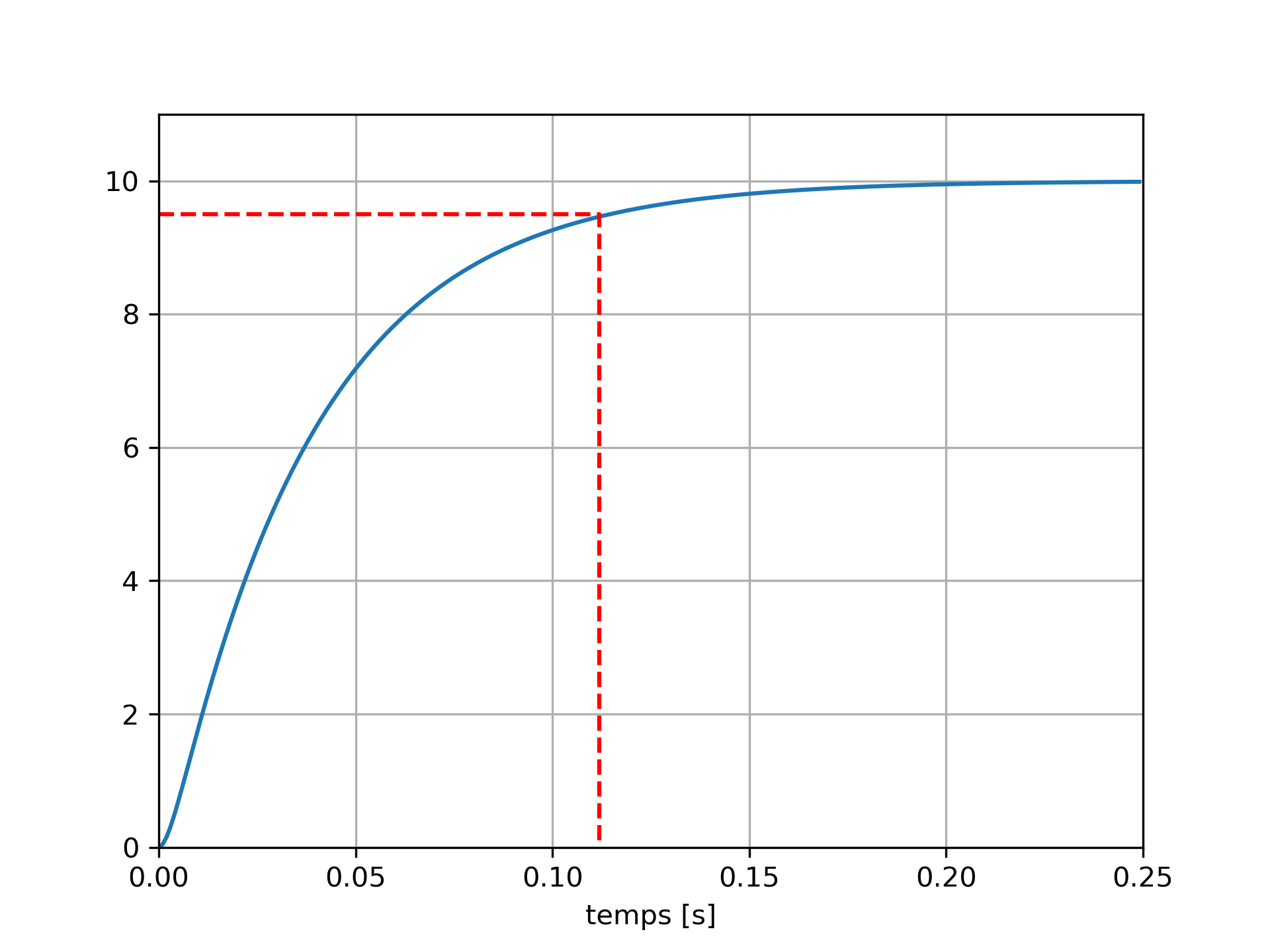
La figure ci-dessus présente la réponse indicielle (
Régime Critique (
Lorsque
avec
Démonstration
Dans le domaine de Laplace, la sortie s’exprime sous la forme :
avec
La fonction
avec :
, , .
En utilisant la transformée de Laplace inverse, nous trouvons :
Il est possible de démontrer les propriétés suivantes:
- Valeur initiale :
, - Valeur finale :
, - Temps de réponse à
: utilisation des abaques. Pour , . - Pas de dépassement :
.
Exemple
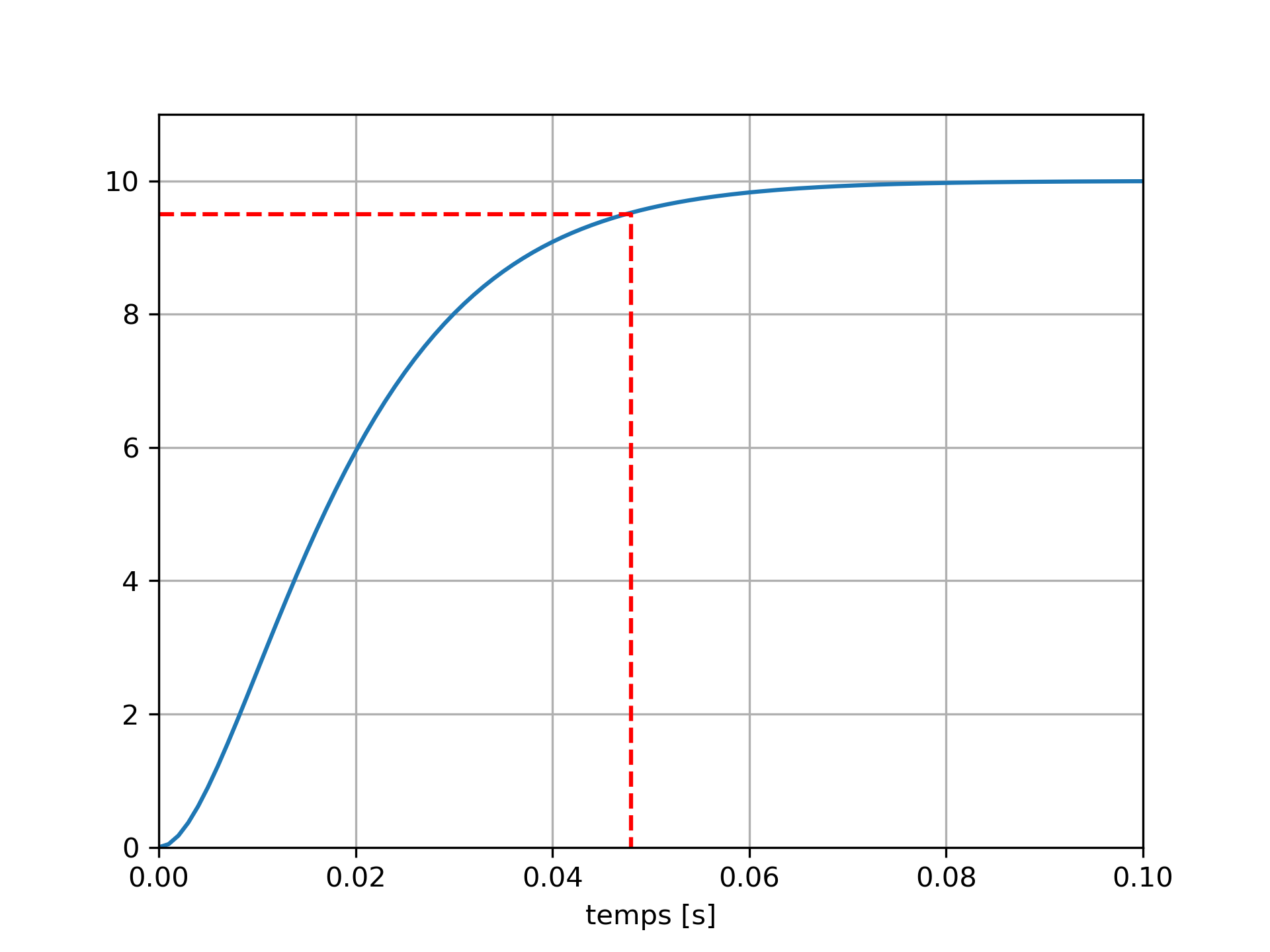
La figure ci-dessous présente la réponse indicielle (
Regime Pseudo-Périodique (
La réponse indicielle s'exprime sous la forme :
où
Démonstration
Dans le domaine de Laplace, la sortie s’exprime sous la forme :
Lorsque
En posant
Par identification, nous obtenons :
En identifiant par rapport aux différentes puissances de
Après resolution du système, nous obtenons
Il est possible de démontrer les propriétés suivantes:
- Valeur initiale :
, - Valeur finale :
, - Temps de réponse à
: Pas de formule simple, utilisation des abaques. - Présence d'oscillations à la pseudo-pulsation (rad/s):
- Premier Dépassement relatif :
, utilisation des abaques.
Pseudo-période
Lorsque
Exemple
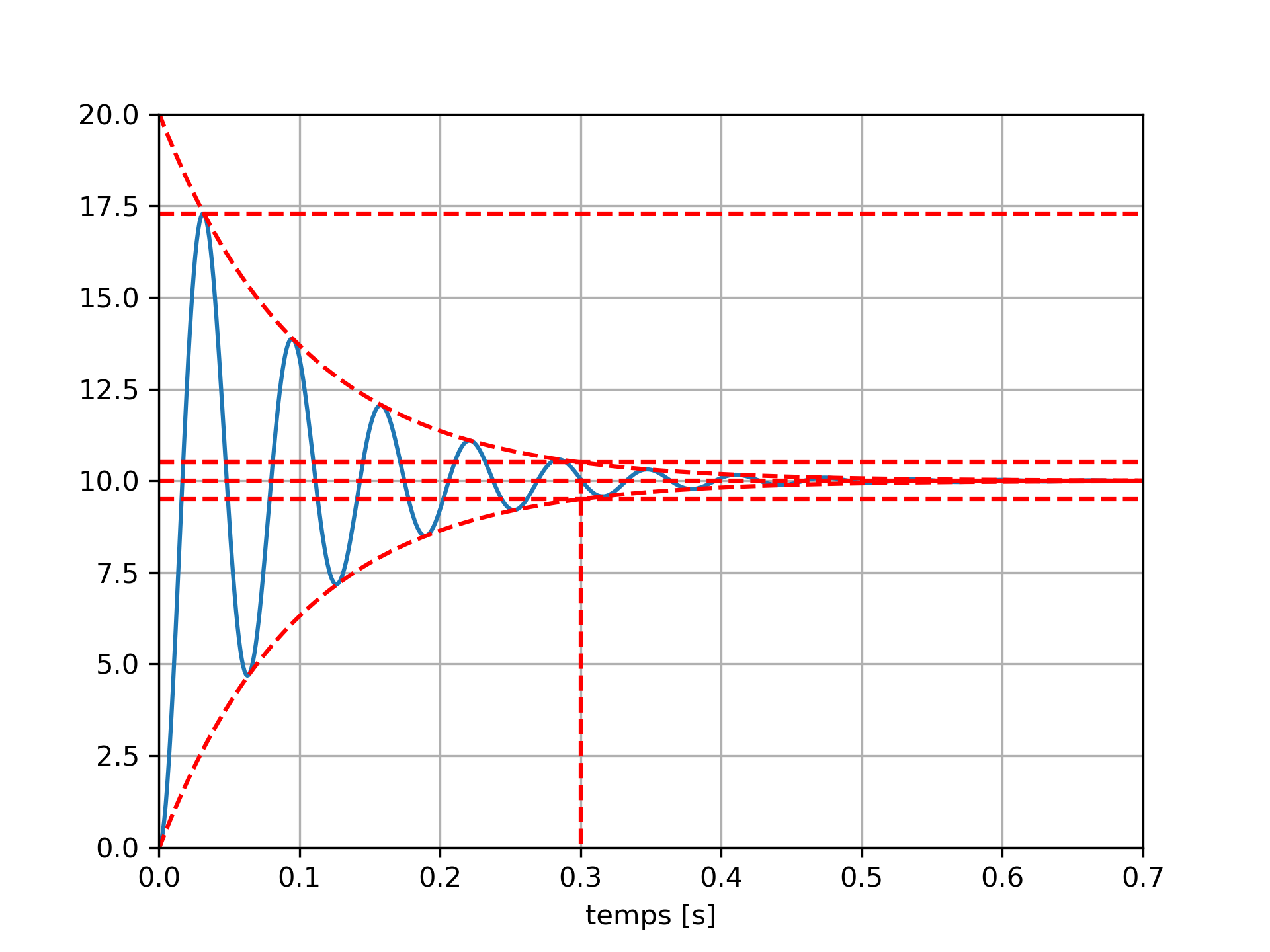
La figure ci-dessus présente la réponse indicielle (
Réponse Fréquentielle
Expression
La réponse fréquentielle d'un système passe-bas de second ordre est donnée par :
où
Module et Argument
Pour un système passe-bas de second ordre, le module et l'argument de la réponse fréquentielle s'expriment sous la forme:
- Module:
- Argument :
où
Point Remarquable
A la pulsation
Résonance
Lorsque
Diagramme de Bode
Représentation du module
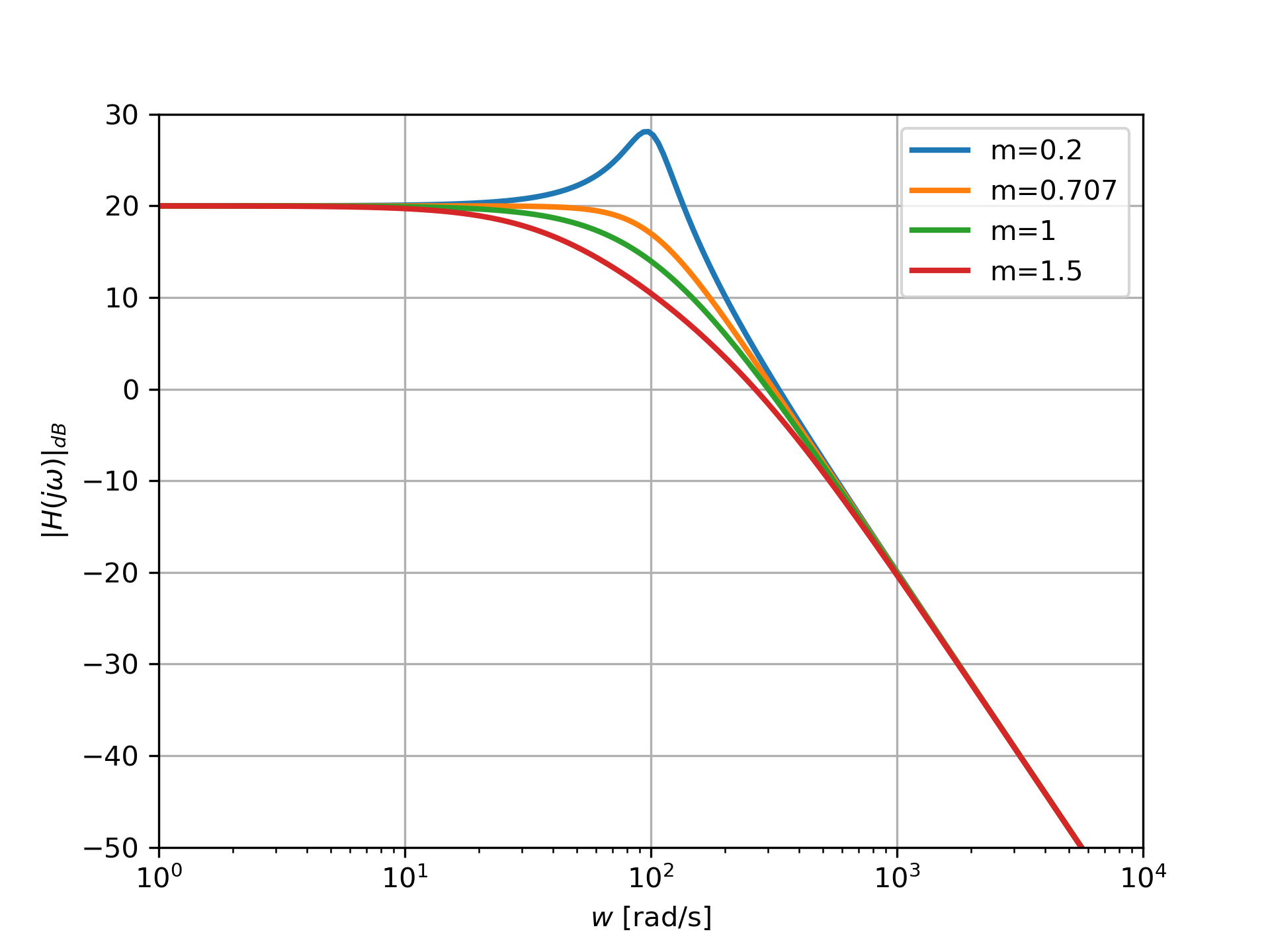
La figure ci-dessus présente le module du diagramme de Bode de plusieurs systèmes de second ordre avec
Représentation de l'argument
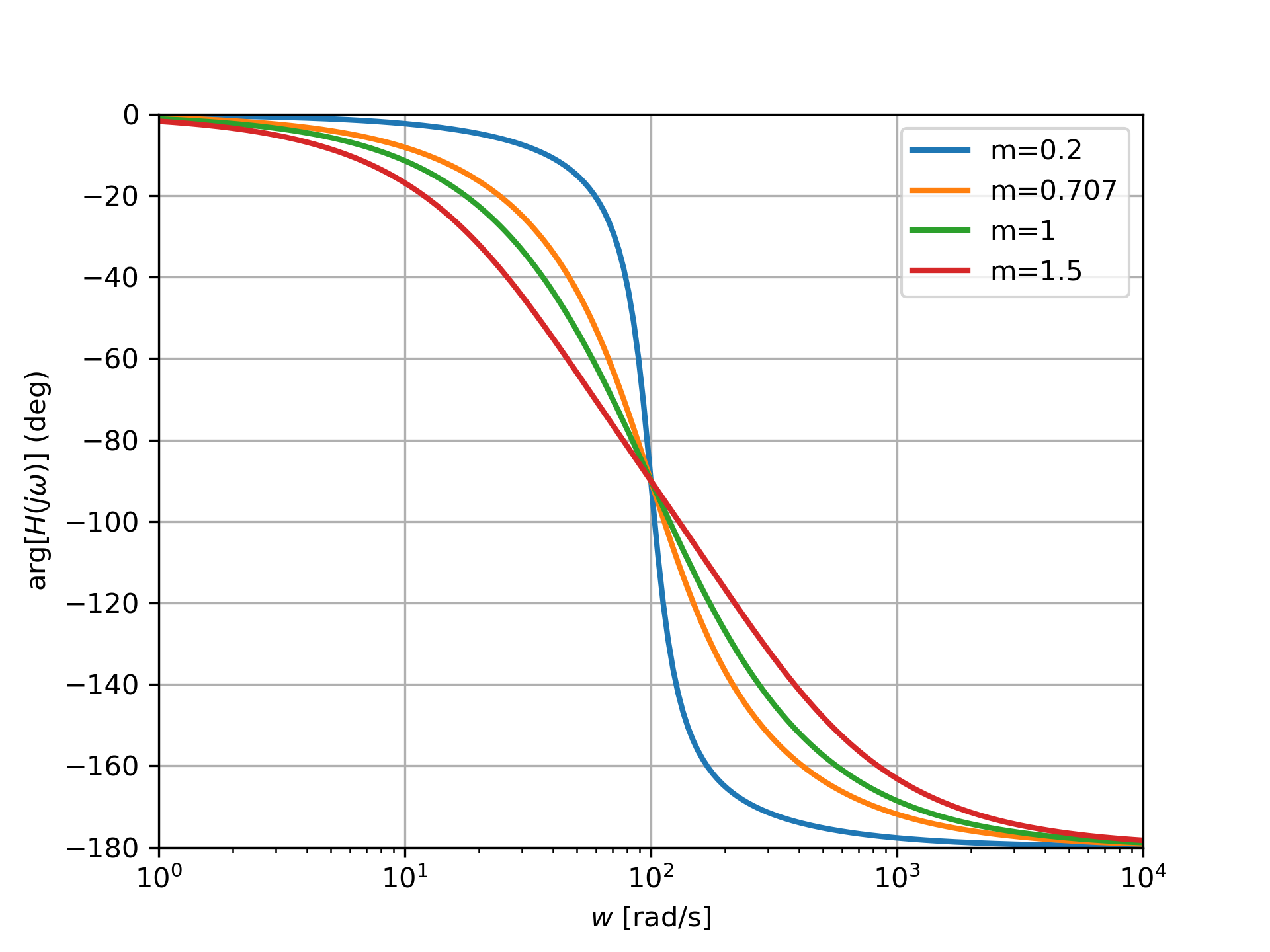
La figure ci-dessus présente le module du diagramme de Bode de plusieurs systèmes de second ordre avec
Diagramme de Black-Nichols
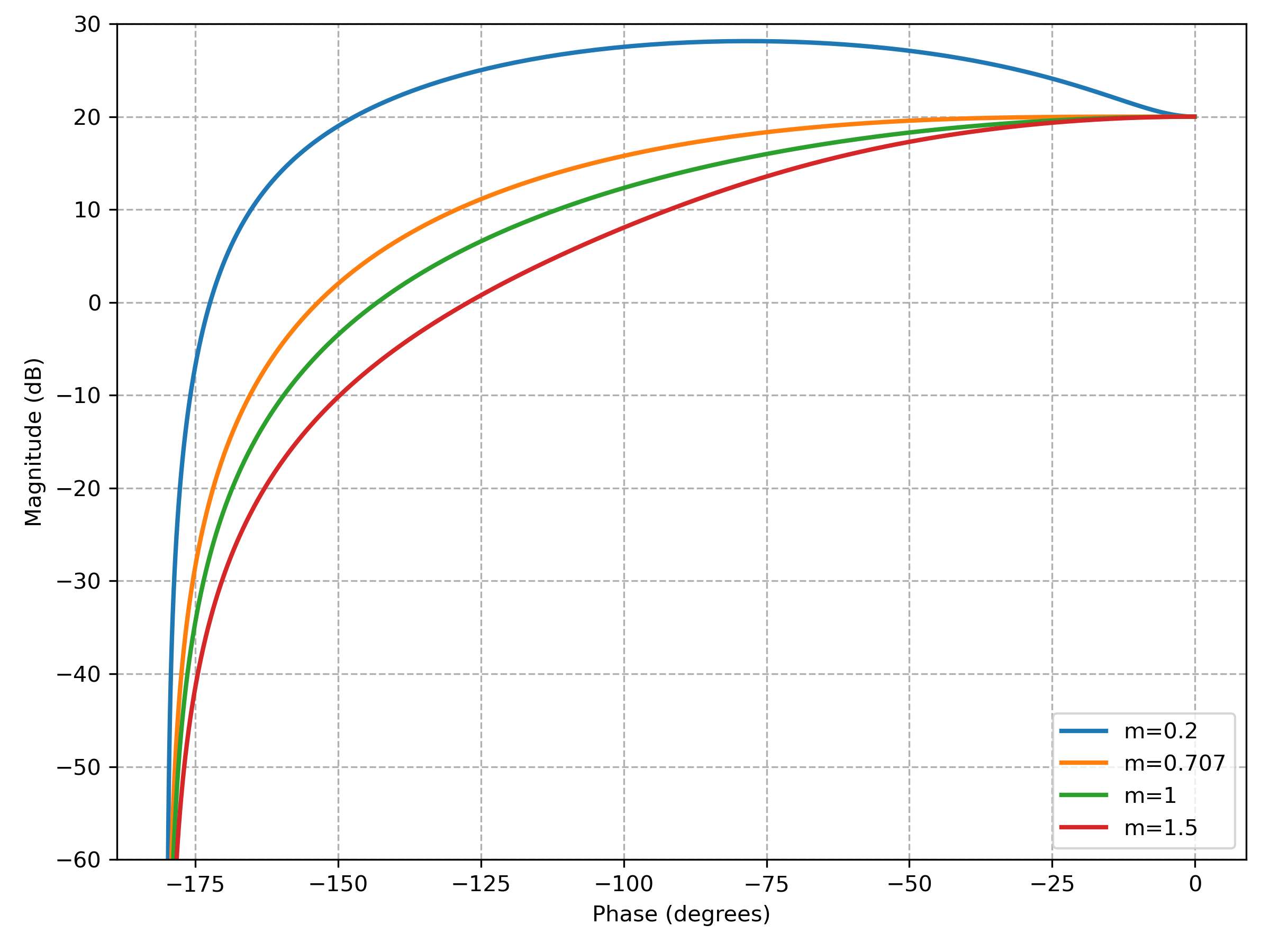
La figure suivante présente les diagrammes de Black-Nichols de plusieurs systèmes passe-bas de second ordre avec