Performances Statiques des Systèmes Bouclés
Cette section analyse la précision des systèmes bouclés en fonction de la type du système en boucle ouverte. Il détaille l’évaluation de l’erreur en régime permanent face à des signaux d’entrée (échelon, rampe) et montre comment l’ajout d’intégrateurs influence la précision. La problématique du rejet des perturbations est également abordée, mettant en évidence le rôle fondamental de la type du système pour assurer robustesse et atténuation des perturbations.
Objectif
Dans ce chapitre, nous montrons comment analyser les performances statiques d'un système en boucle fermée (précision, rejet des perturbations) à partir de la type du système en boucle ouverte.
Type du système
Le comportement du système en boucle fermée va directement dépendre de la classe du système en boucle ouverte.
La classe d’un système est définie par le nombre d’intégrateurs purs (pôles à l’origine) présents dans la fonction de transfert en boucle ouverte. En utilisant la forme factorisée, la fonction de transfert d'un système de classe
: type du système : gain statique du système.
Précision
La précision d'un système peut être mesurée en évaluant l'erreur de poursuite entre l'entrée et la sortie du système
Cas général
L'erreur en régime permanent s'exprime sous la forme :
Dans les sections suivantes, nous allons évaluer l'expression de
Réponse Indicielle
Lorsque
- Si
, l'erreur en régime permanent est égale à . - Si
, l'erreur en régime permanent est nulle.
Correction
Pour obtenir un système précis, un stratégie de correction possible consiste à ajouter un "intégrateur" en boucle ouverte.
Exemple
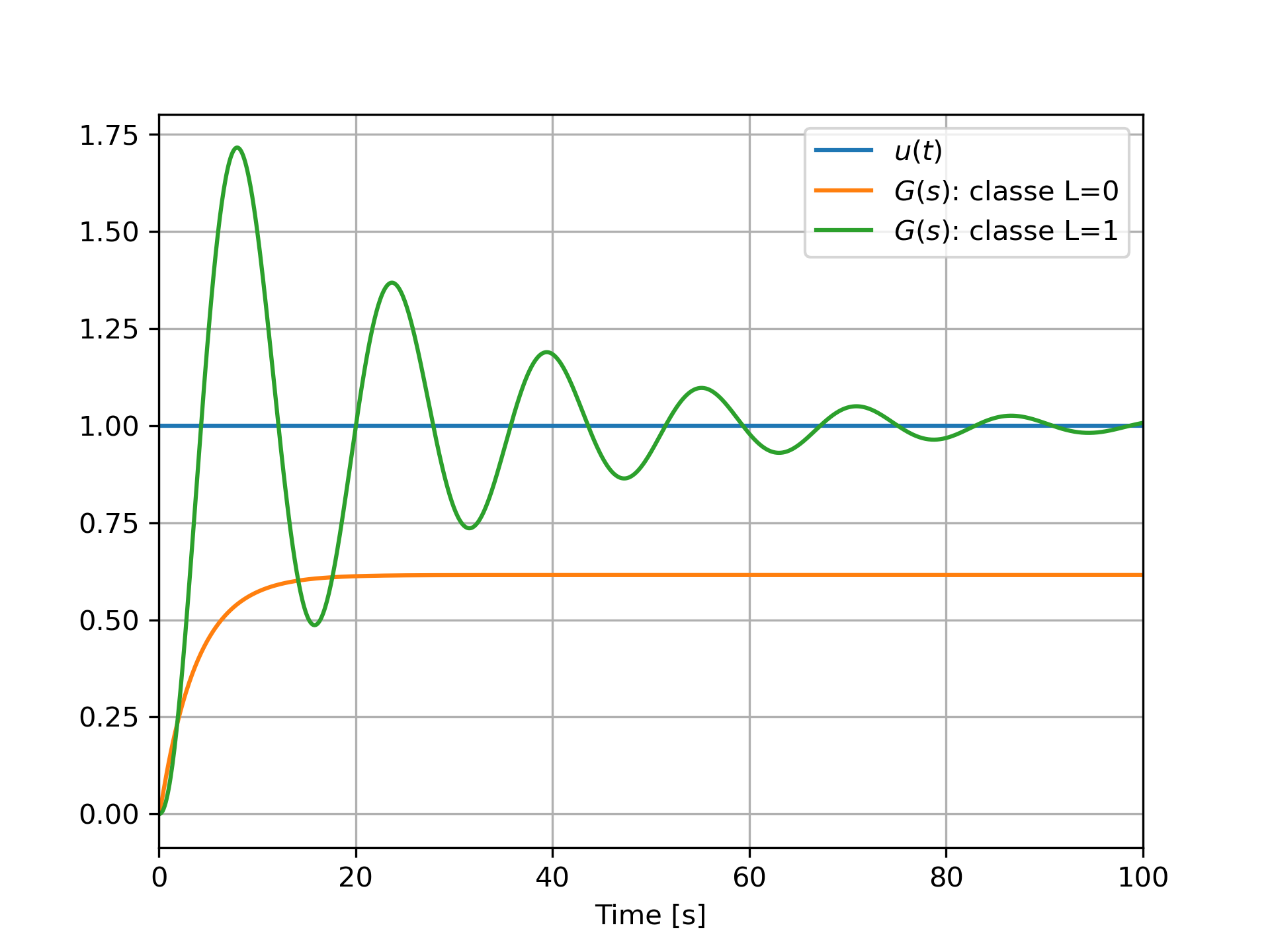
La figure ci-dessus présente la réponse indicielle en boucle fermée de deux systèmes : le premier système possède une boucle ouverte
Réponse à une rampe
Lorsque
- Si
, l'erreur en régime permanent est égale . - Si
, l'erreur en régime permanent est égale à où - Si
, l'erreur en régime permanent est nulle.
Exemple
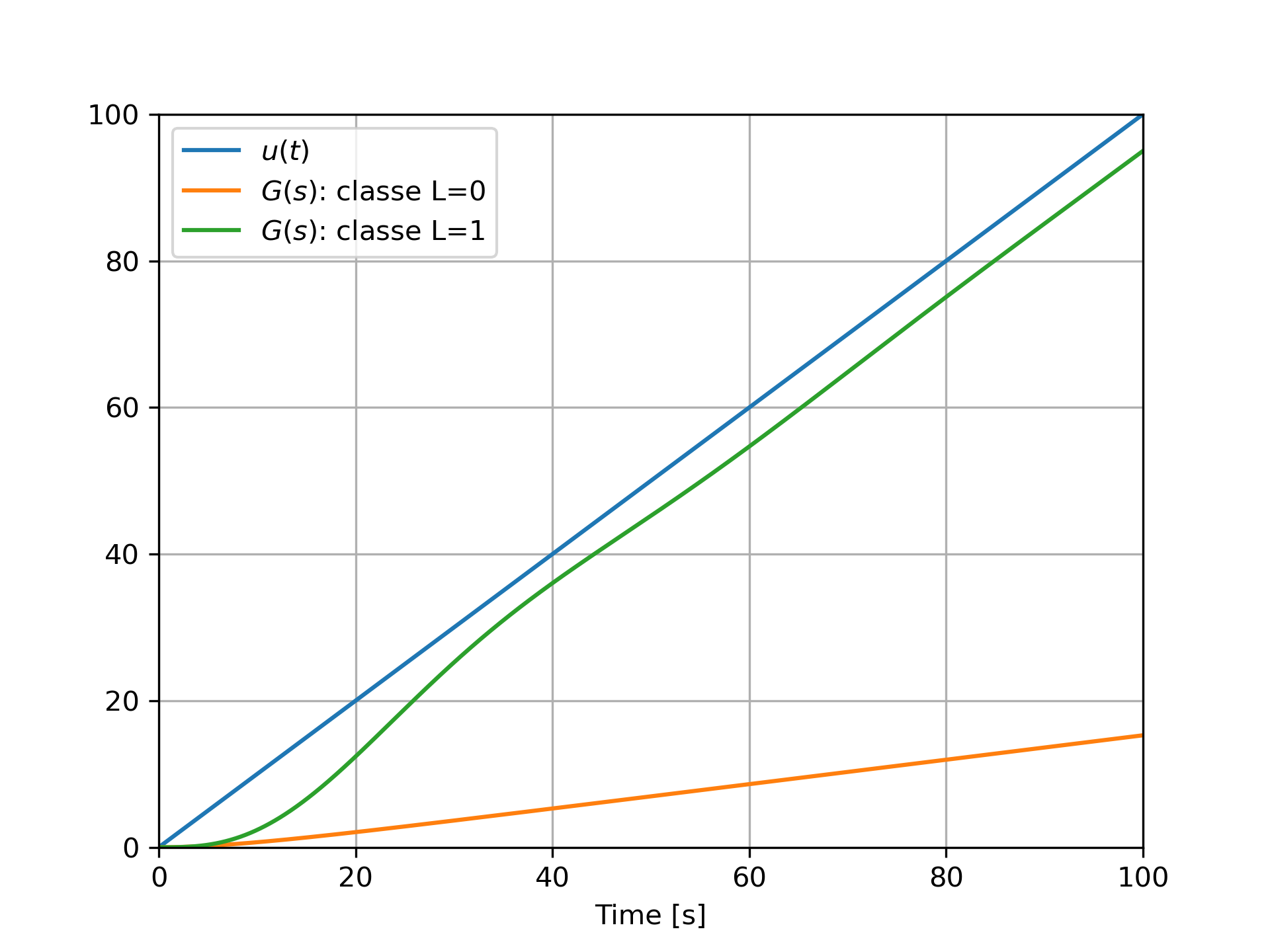
La figure ci-dessus présente la réponse à une rampe en boucle fermée de deux systèmes : le premier système possède une boucle ouverte
Synthèse
La tableau suivant résume l'expression de l'erreur en régime permanent pour des entrées de type échelon ou rampe en fonction de la type du système en boucle ouverte. Dans ce tableau,
| Classe | Échelon | Rampe |
|---|---|---|
Rejet des perturbations
Dans de nombreux systèmes réels, des perturbations extérieures peuvent affecter les performances du système bouclé. Pour obtenir un système robuste, il est nécessaire de limiter l'impact de ces perturbations sur la sortie. Dans cette section, nous nous focalisons sur le cas classique où la perturbation
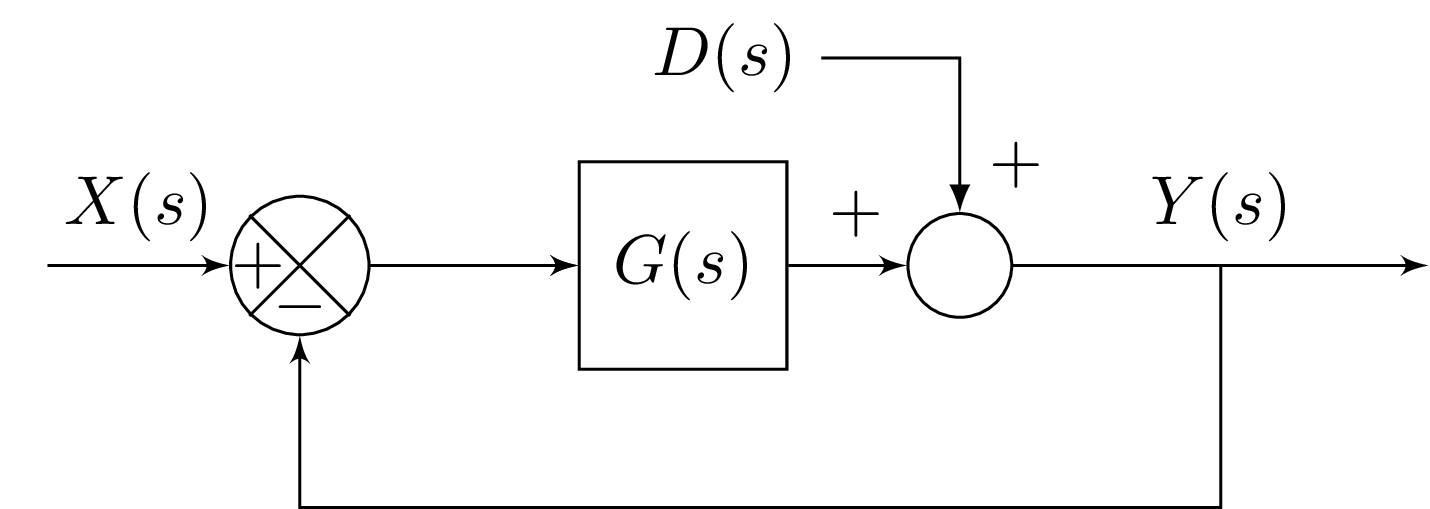
: fonction de transfert du système en boucle ouverte, : transformée de Laplace de la perturbation.
Cas général
Notons respectivement
correspond à la fonction de transfert en boucle fermée sans perturbation, correspond à la fonction de transfert du rejet des perturbations.
Perturbation de type échelon
Si
- Si
, alors l'influence de la perturbation en régime permanent est égale à (rejet partiel). - Si
, alors l'influence de la perturbation en régime permanent est nulle (rejet complet).
Perturbation de type rampe
Si
- Si
, alors l'influence de la perturbation en régime permanent est égale à (incapacité totale à rejeter la perturbation). - Si
, alors l'influence de la perturbation en régime permanent est égale à où (rejet partiel avec erreur finie). - Si
, alors l'influence de la perturbation en régime permanent est nulle (rejet complet).
Exemple
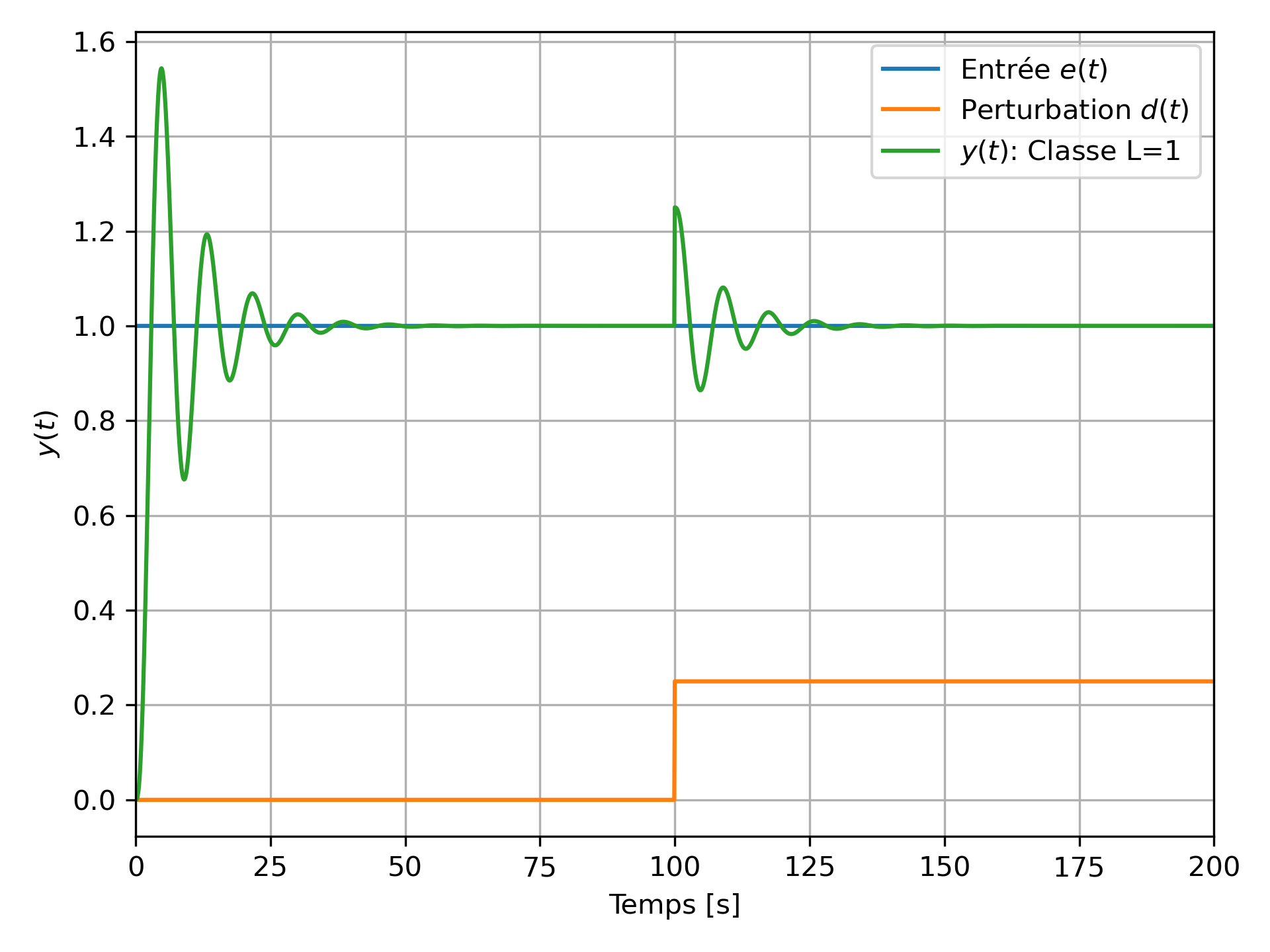
La figure ci-dessus présente le comportement en boucle fermée d'un système
Synthèse
| Classe | Perturbation échelon | Perturbation rampe |
|---|---|---|