Performances Dynamique des Systèmes Bouclés
Cette section s’intéresse aux performances dynamiques (temps de réponse, dépassement). Il présente l’utilisation de l’abaque de Black-Nichols pour estimer les caractéristiques d’un système bouclé à partir du lieu de Black de la boucle ouverte. En se basant sur une approximation par un système du second ordre, les grandeurs dynamiques (gain statique, pulsation naturelle, facteur d’amortissement) sont extraites et validées par comparaison avec les réponses temporelles.
Objectif
Dans ce chapitre, nous montrons comment analyser les performances dynamiques d'un système en boucle fermée (temps de réponse, dépassement) à partir de son lieu de Black en boucle ouverte en utilisant une approximation second ordre.
Abaque de Black-Nichols
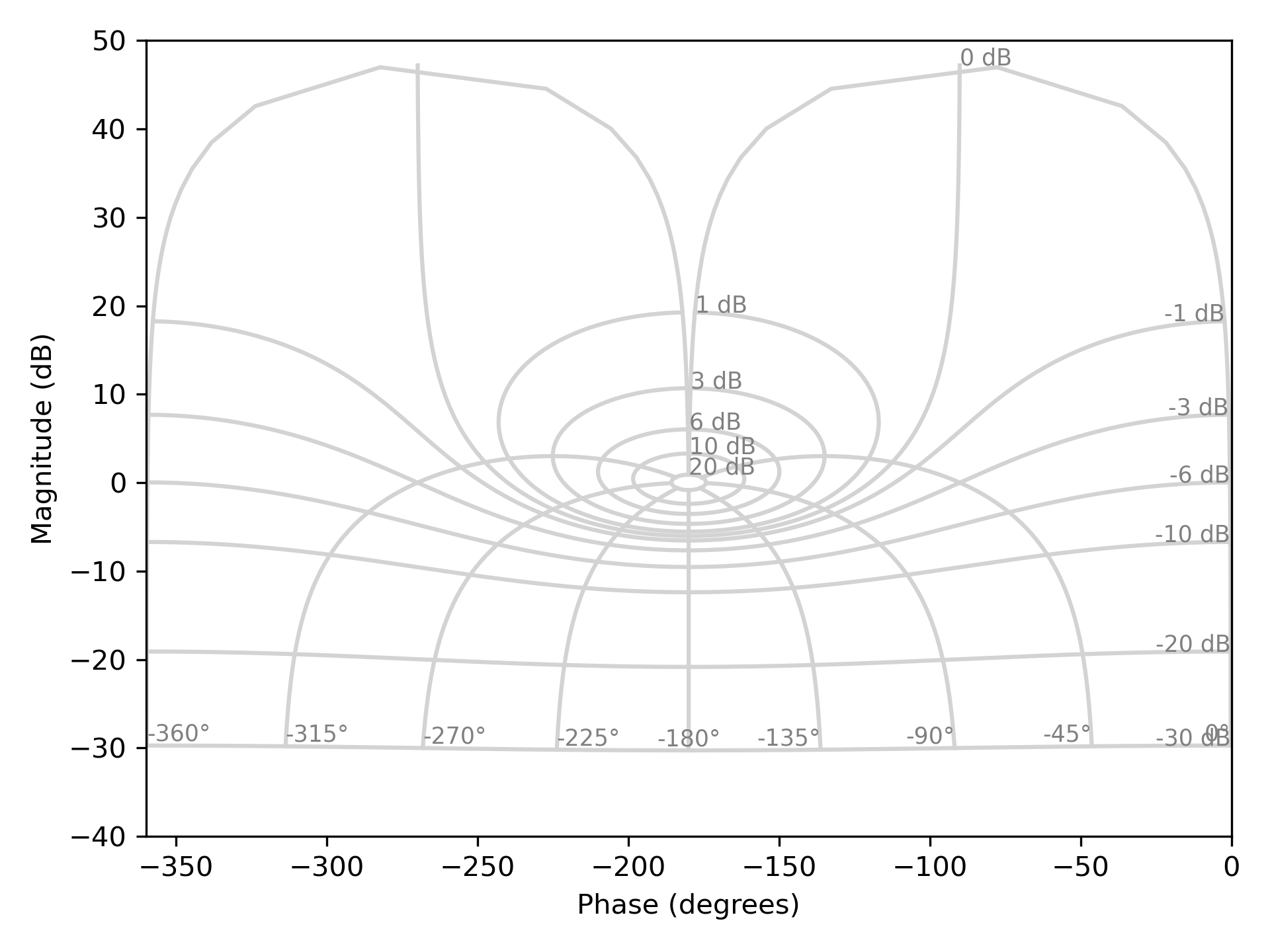
L'abaque de Black-Nichols permet de déterminer graphiquement certaines caractéristiques de la fonction de transfert en boucle fermée
Contours de gain: le contour iso-gain nommé
dB indique tous les points en boucle ouverte pour lesquelles le gain en boucle fermée est égal à dB. Contours de phase: le contour iso-phasé nommé
deg indique tous les points en boucle ouverte pour lesquelles la phase en boucle fermée est égale à deg.
Approximation de la Dynamique
En utilisant les contours de gain et en approximant la dynamique du système en boucle fermée par celle d'un second ordre, il est possible d'obtenir rapidement les paramètres dynamique du systèmes en boucle fermée.
Principe
WARNING
Attention, la méthodologie décrite ci-dessous permet d'extraire les paramètres en boucle fermée à partir du lieu de Black en boucle ouverte.
Le gain statique en boucle fermée
(dB) est donnée par le contour iso-gain qui tend vers le lieux de Black du système en boucle ouverte en basse-fréquence. En valeur naturelle, le gain statique en boucle fermée est alors donné par . Le gain maximum en boucle fermée
(dB) est donnée par le contour iso-gain qui tangeante le lieux de Black du système en boucle ouverte. La pulsation associée correspond à la pulsation de résonance en boucle fermée . La différence
(dB) correspond au facteur de résonance en boucle fermée. L'utilisation des abaques de second ordre permet ensuite de trouver le facteur d'amortissement en boucle fermée à partir de . La pulsation naturelle en boucle fermée s'obtient finalement à partir
et via la relation
Exemple
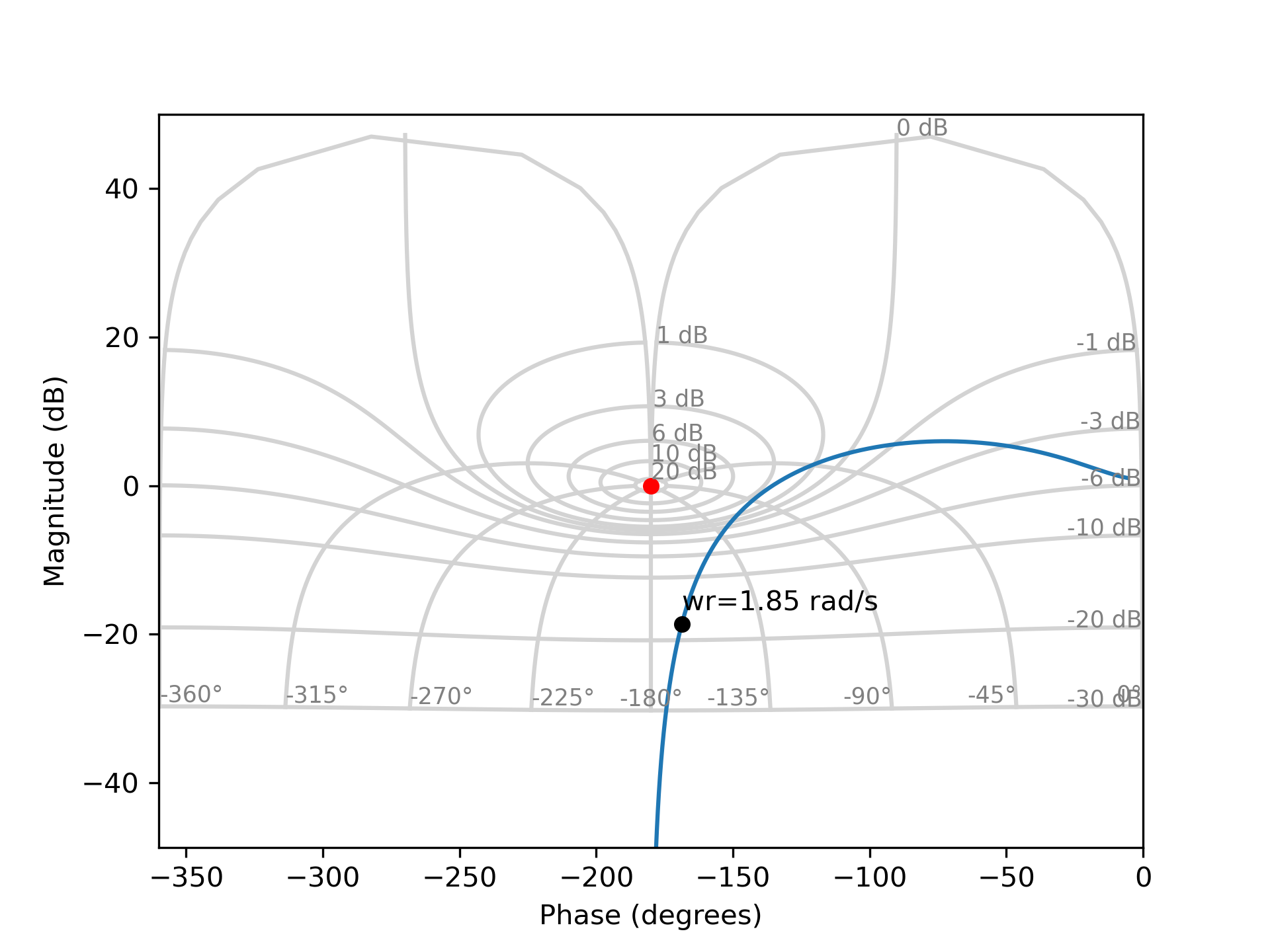
La figure ci-dessus présente le lieu de transfert d'un système en boucle ouverte ainsi que les contours de gain. En appliquant la méthodologie, nous obtenons :
- un gain statique en BF égal à
dB, soit . - un gain maximum en BF égal à
dB et une pulsation de résonance égale à rad/s. - un facteur de résonance en BF égale à
dB. En utilisant les abaques de second ordre, nous trouvons . - une pulsation naturelle en BF égale à
rad/s.
Vérification
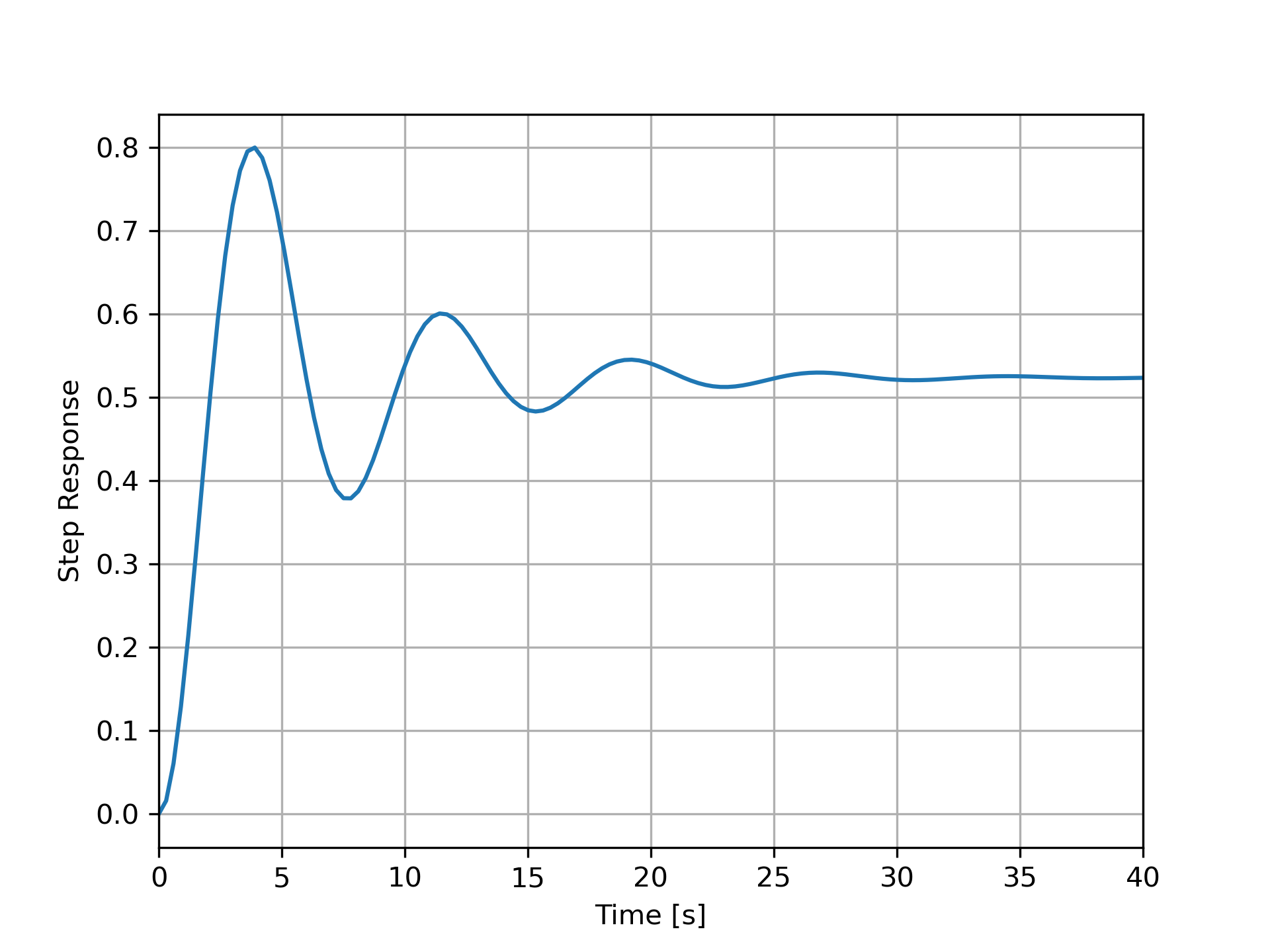
Pour vérifier nos résultat, la figure ci-dessus présente l'allure la réponse indicielle en boucle fermée (