Correcteur Proportionnel-Intégral (PI)
Fonction de transfert
La fonction de transfert d'un correcteur proportionnel intégral peut s'exprimer sous plusieurs formes :
- Forme parallèle :
où
- Forme série :
où
Expression des pôles et zéros
La fonction de transfert peut s'exprimer sous la forme factorisée suivante :
Cette fonction de transfert possède :
- un zéro en
, - un pôle en
.
L'ajout d'un pôle en
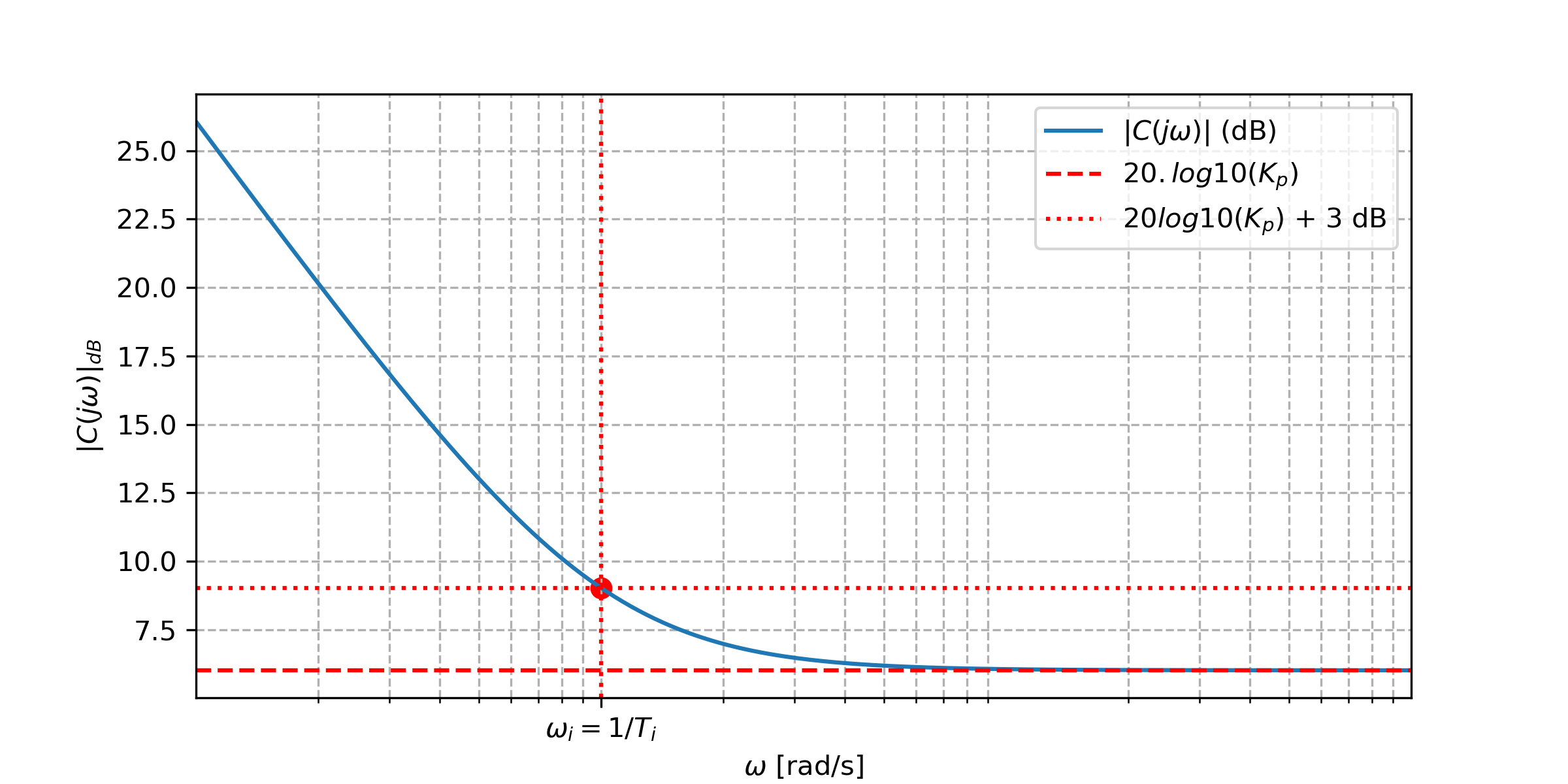
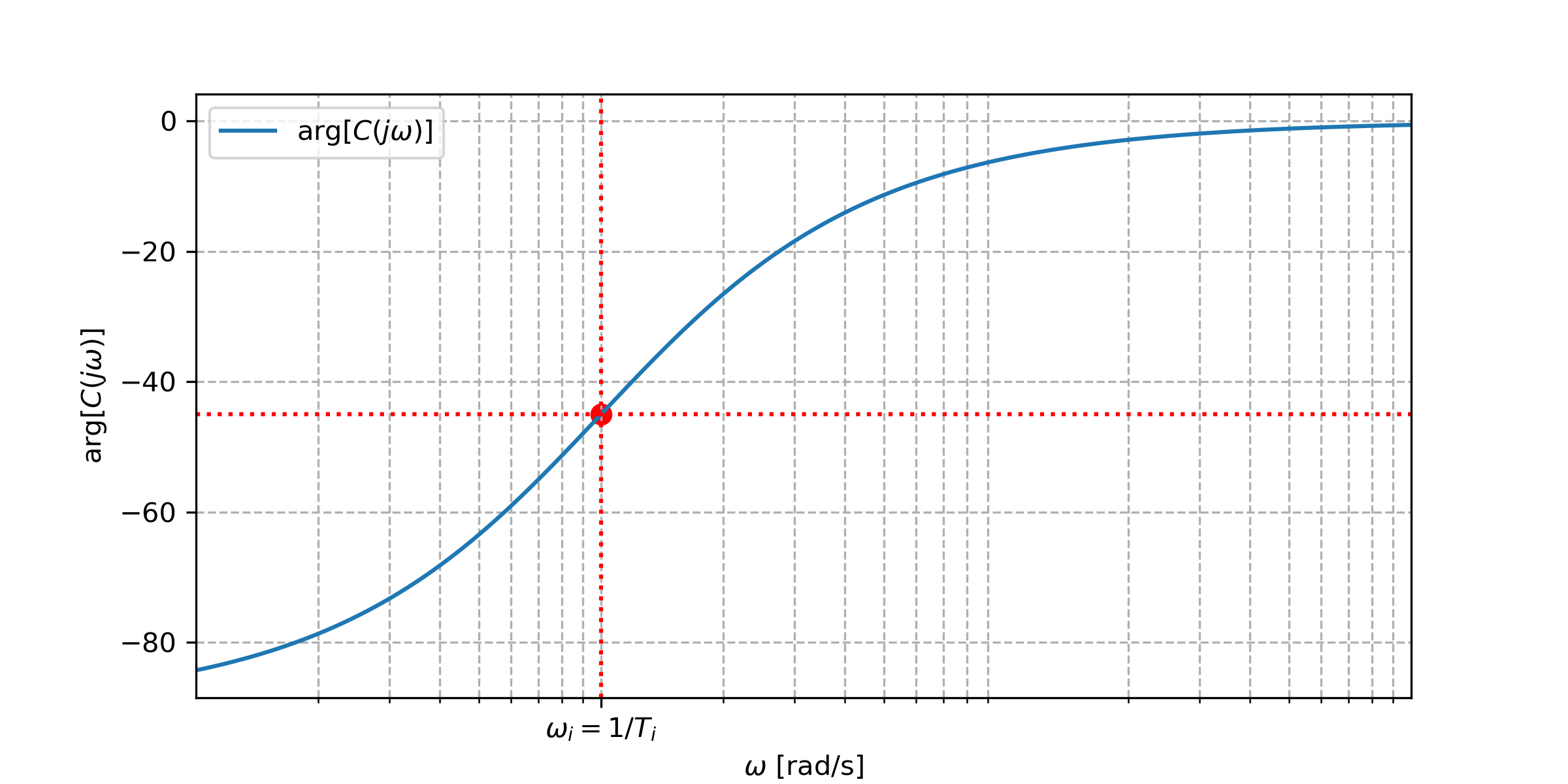
Analyse harmonique
- Gain :
- Argument / Phase (
):
Notons que la réponse fréquentielle possède un point particulier en
Illustration
Le correcteur PI apporte un gain infini en basse-fréquence. Cette propriété permet à la fonction de transfert en boucle ouverte
Technique de réglage
Il existe différentes techniques de réglage possible pour le correcteur PI. Un bon réglage doit permettre d'apporter de la précision tout en maintenant des marges de gain et de phase acceptable. Pour régler les paramètres du correcteur consiste à régler successivement le paramètre
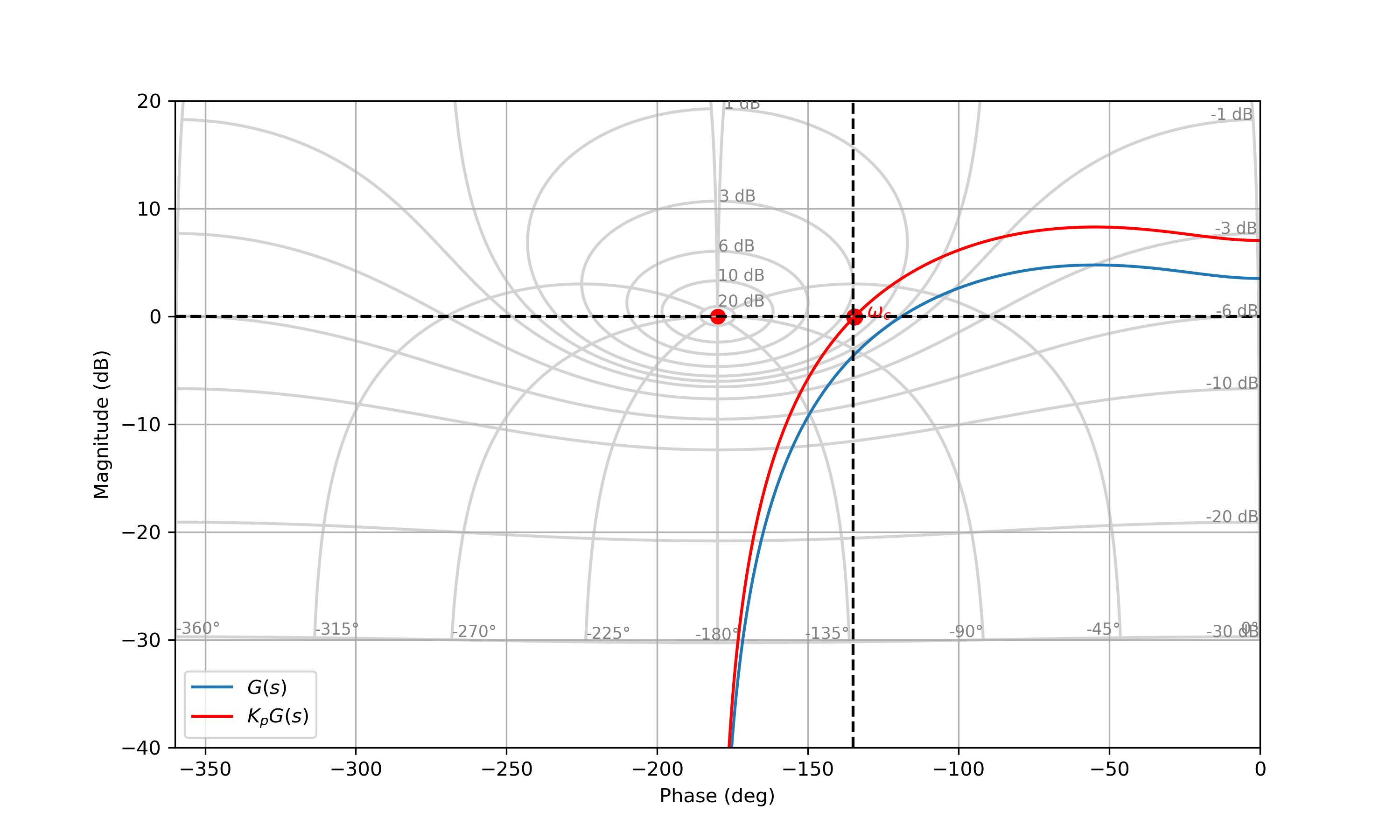
Réglage du gain proportionnel
Le réglage du gain
- une marge de phase
(typiquement ) - où une marge de gain
(typiquement dB).
À la fin de cette étape, on détermine la pulsation de coupure
Réglage du gain intégral
Pour régler le gain intégral, une approche possible consiste à imposer que son action ne perturbe pas les marges de stabilité. Pour respecter cette contrainte, il est nécessaire que
Notons que l'utilisation d'une valeur de
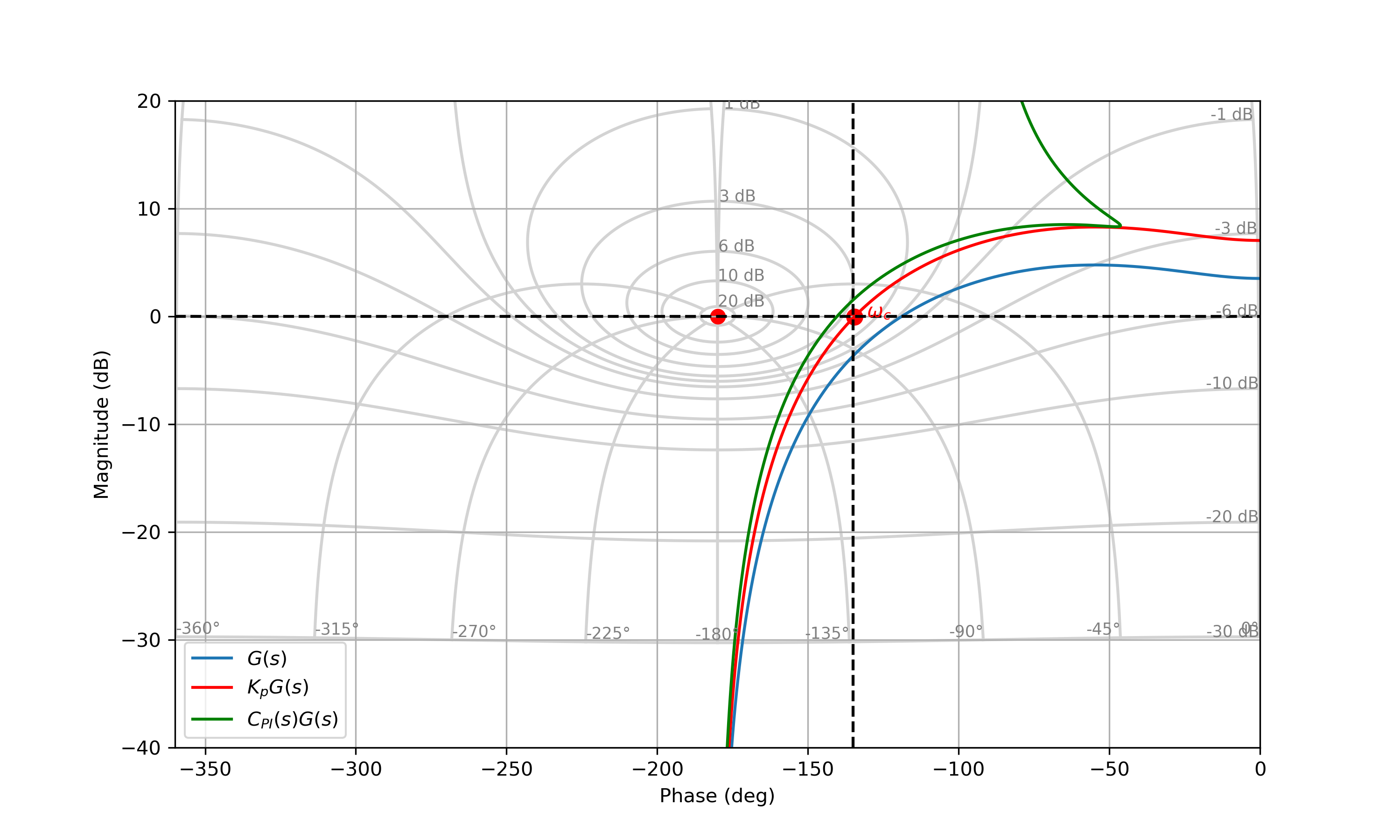
Notons que l'introduction du gain intégral peut perturber légèrement la pulsation de coupure. Dans ce contexte, il peut être intéressant de modifier le gain proportionnel à posteriori.