Correcteur à Avance de Phase (AP)
Fonction de transfert
La fonction de transfert d'un correcteur à avance de phase peut s'exprimer sous plusieurs formes :
où
Expression des pôles et zéros
La fonction de transfert possède :
- un zéro en
, - un pôle en
.
Analyse harmonique
La réponse harmonique s'exprime sous la forme :
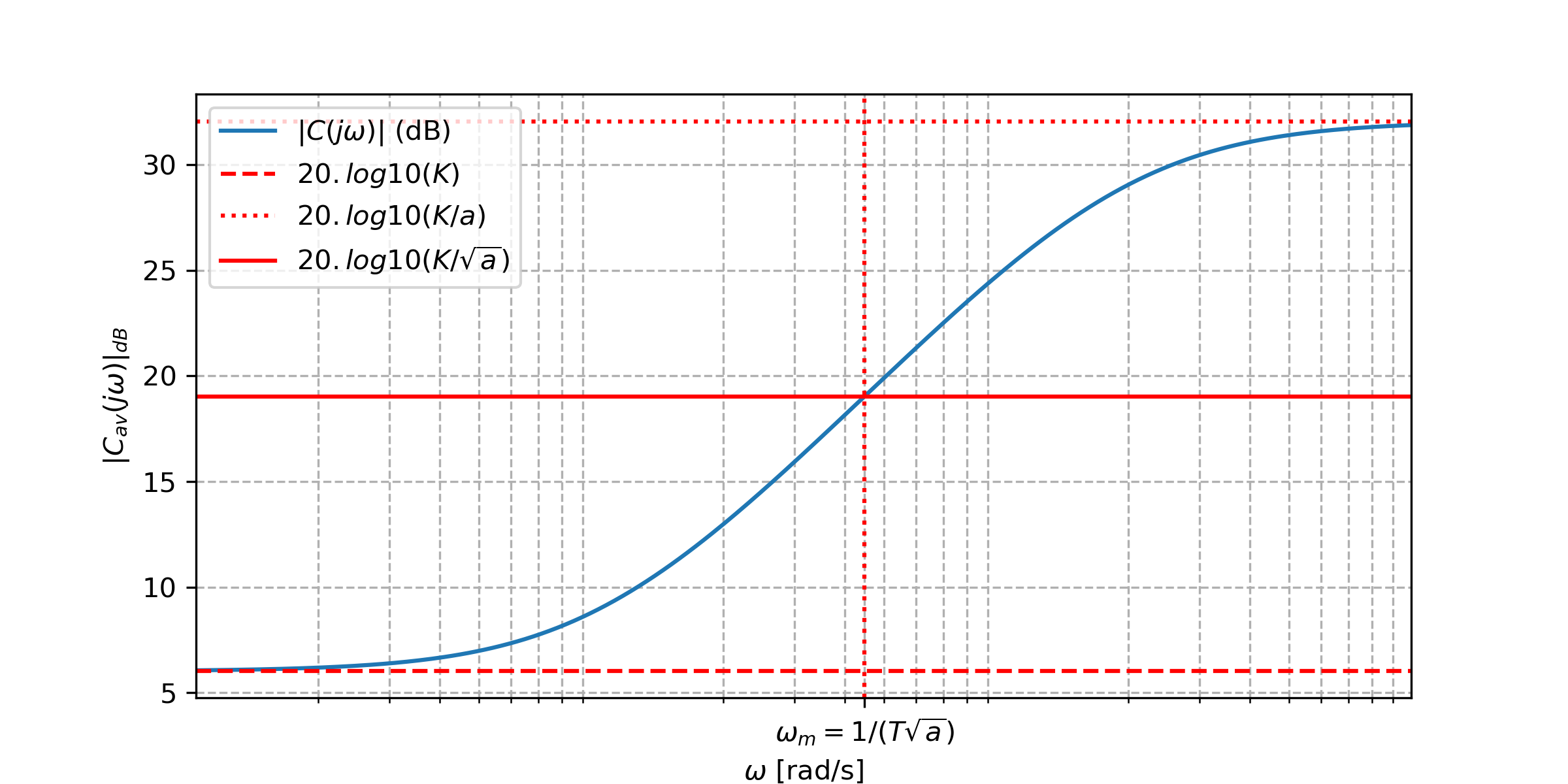
- Gain :
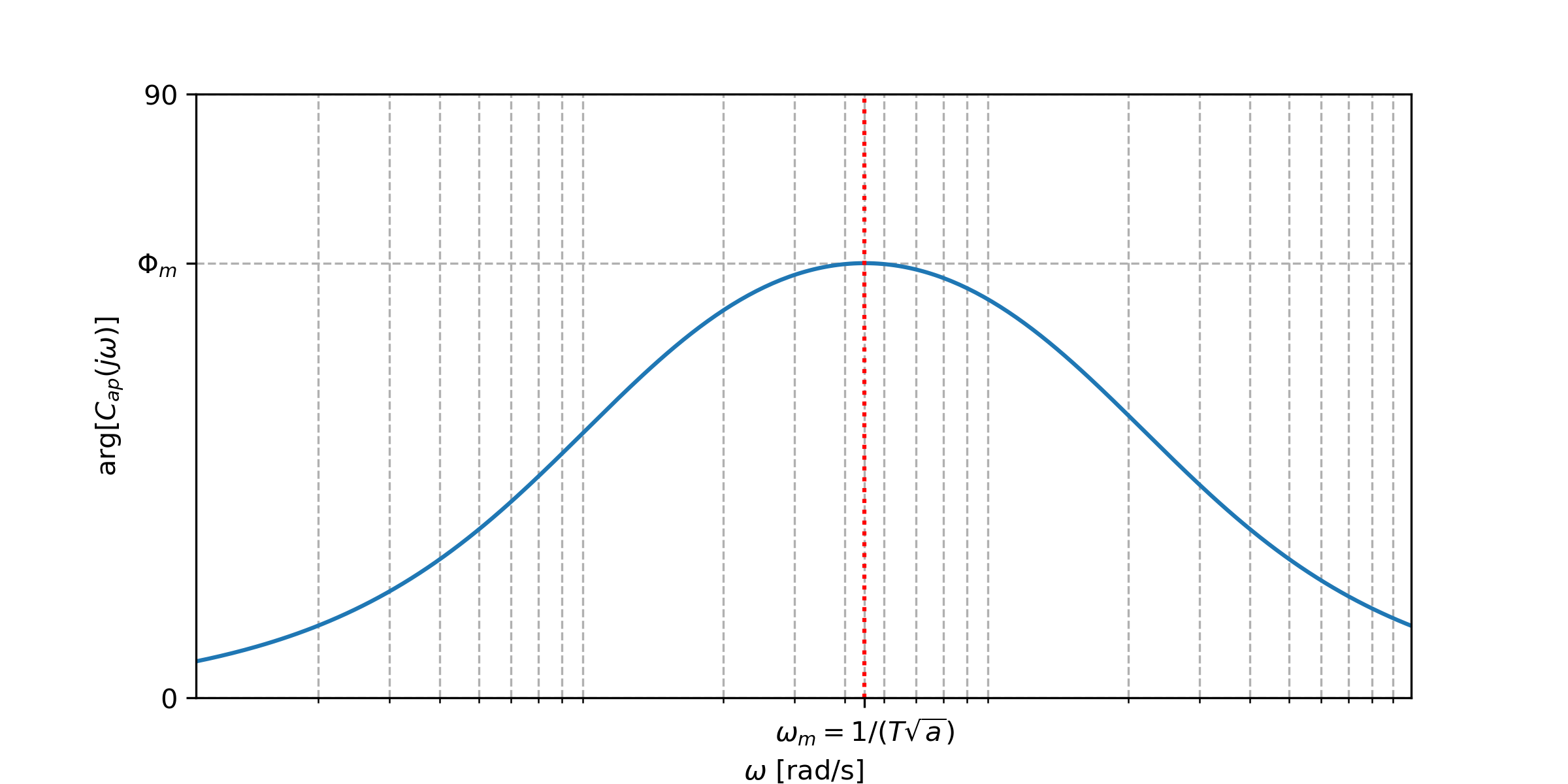
- Argument / Phase (
):
Maximisation de l'apport de phase
Il est possible de démontrer que la phase présente un maximum
à la pulsation
A cette pulsation, le gain et la phase sont respectivement donnés par :
- Gain :
- Phase (en radian):
Illustration
Le correcteur AP permet d'ajouter de la phase, surtout aux moyennes fréquences. Il permet de gagner en stabilité. Le correcteur AP permet de s'affranchir des dilemmes stabilité / rapidité
Technique de réglage
Pour régler les 3 paramètres du correcteur, une technique possible consiste à imposer:
- la marge de phase
souhaitée, - la pulsation de coupure à
dB, souhaitée. - un incrément de phase maximum à la pulsation de coupure à
dB.
Réglage de l'apport de phase (paramètres
- On impose
rad/s où correspond à la pulsation de coupure à dB souhaitée. - On mesure
la phase mesurée à la pulsation . - On calcule l'incrément de phase nécessaire
permettant d'atteindre la marge de phase souhaitée c-à-d . Nous obtenons :
- On fixe le paramètre
de manière à fixer l'incrément de phase souhaité :
où
- On fixe le paramètre
pour obtenir l'incrément de phase souhaitée à la pulsation :
Réglage du gain (paramètre
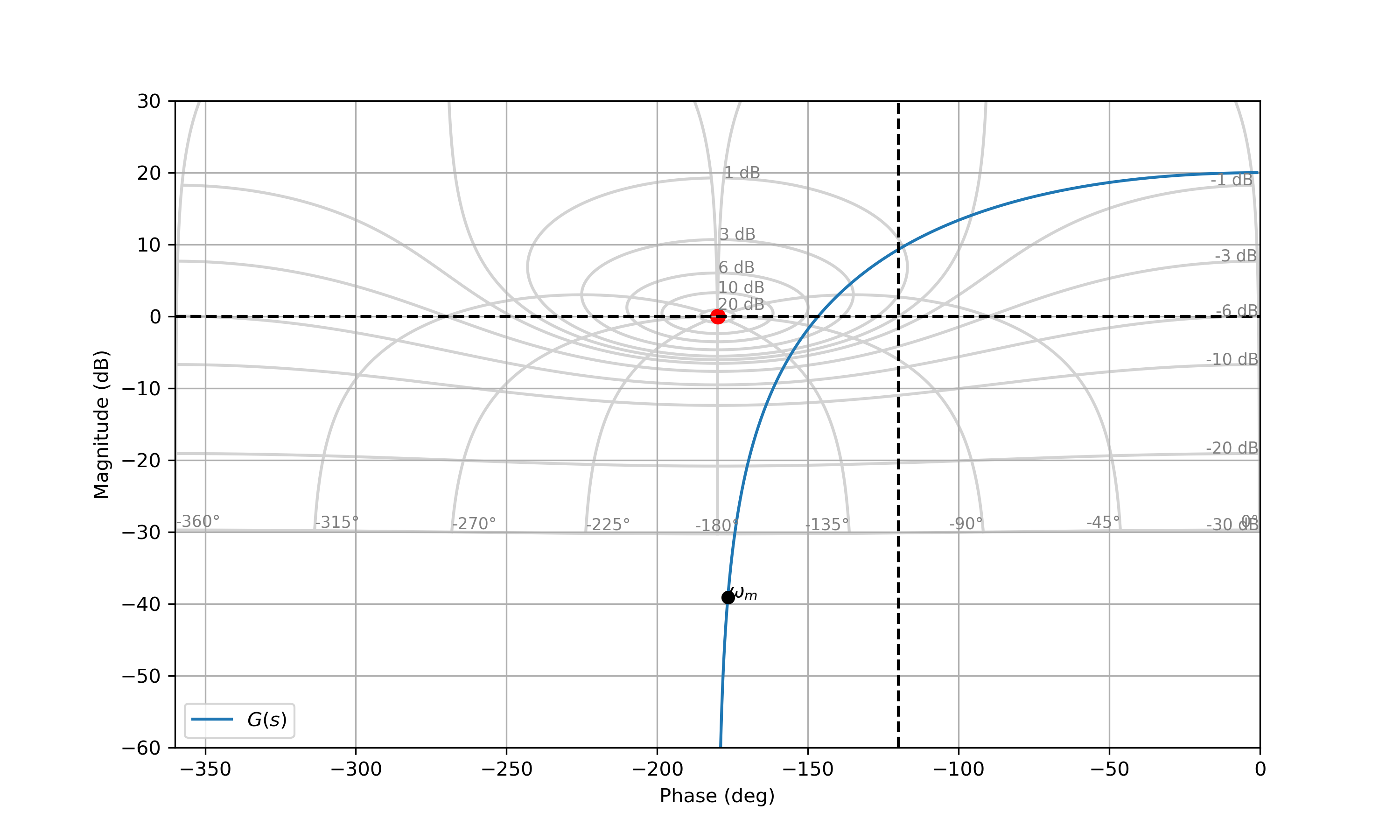
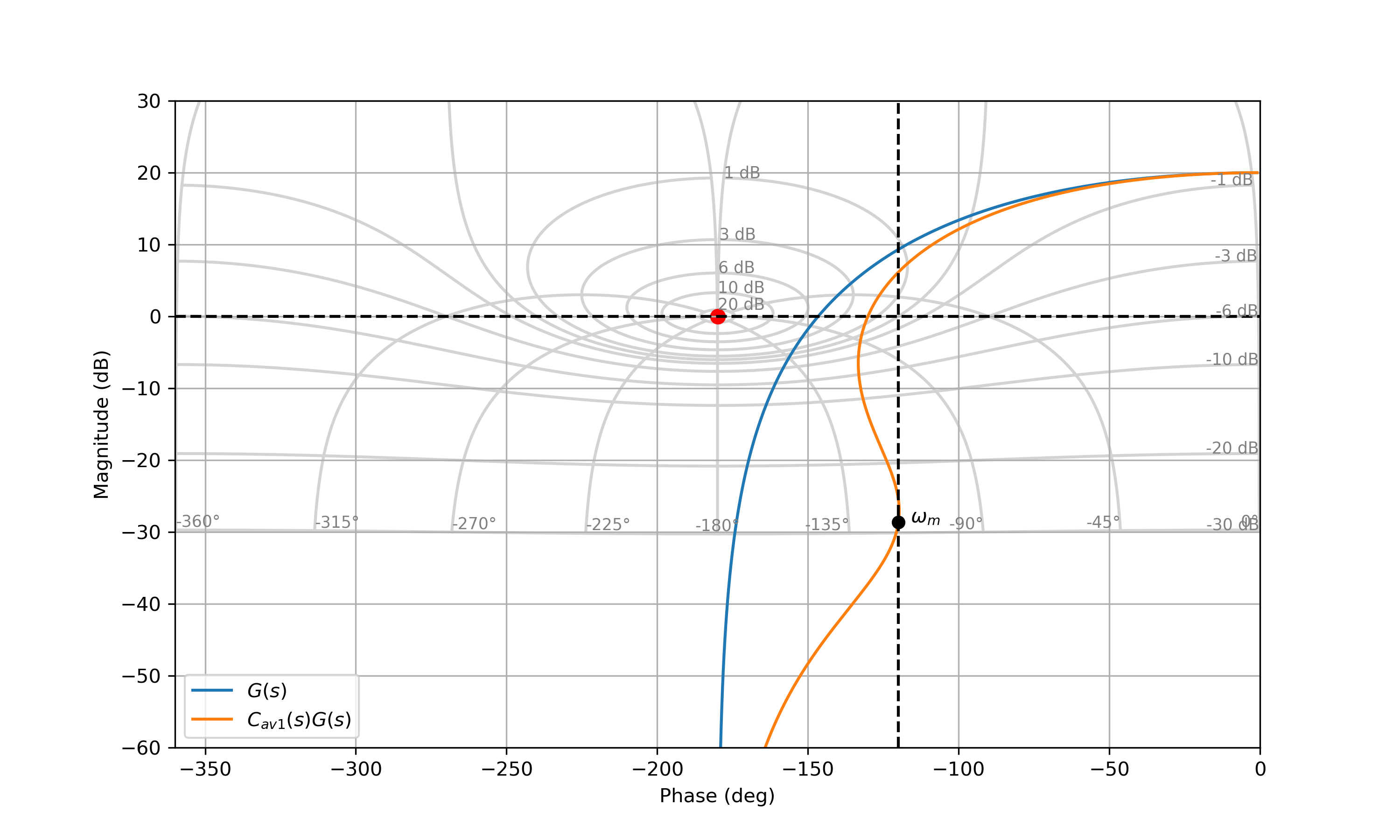
- On trace le lieu en boucle ouverte du système corrigé
où désigne la fonction de transfert du correcteur par avance de phase lorsque , - On évalue le gain en dB à la pulsation
, c-à-d . - On fixe le paramètre
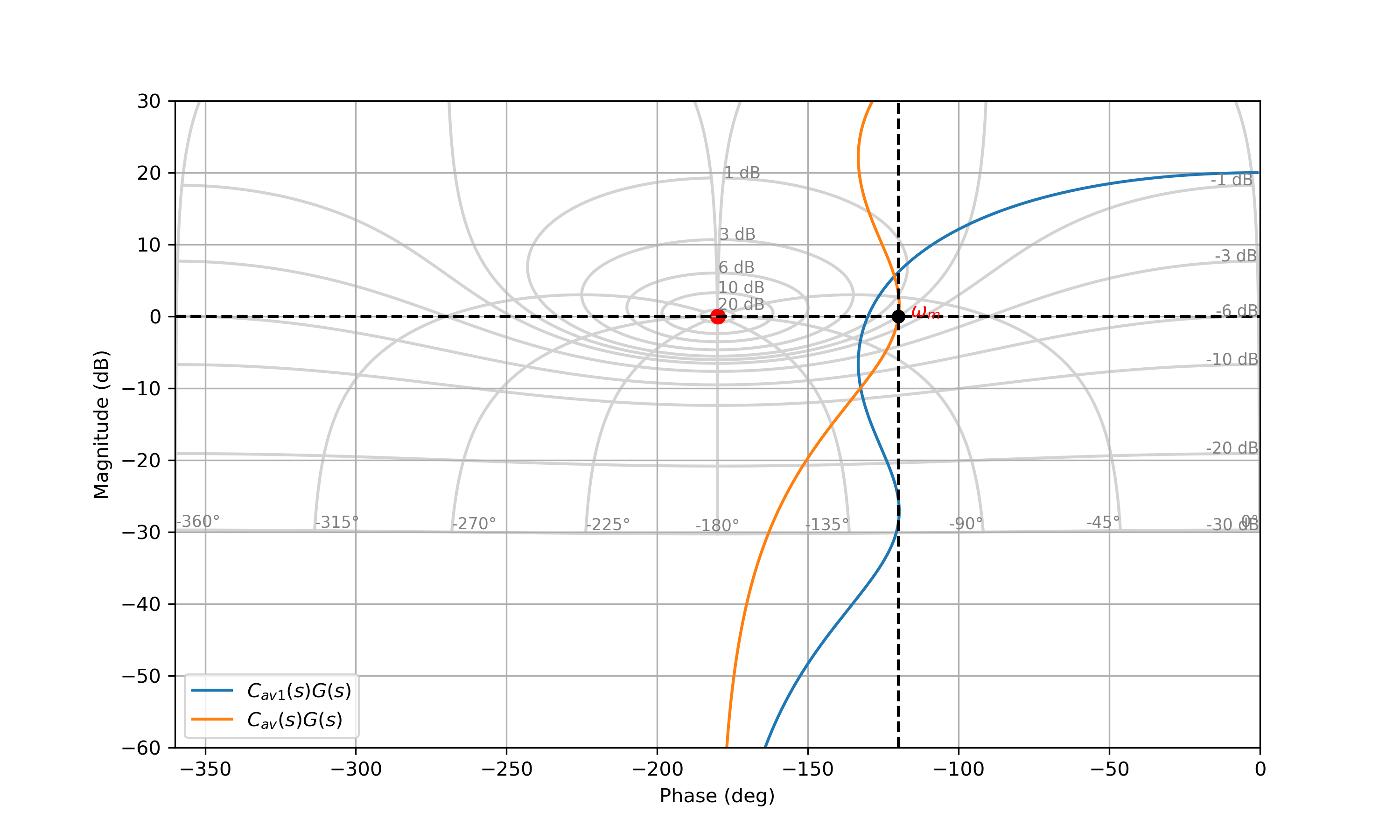
avec pour obtenir un gain de dB à la pulsation .
Exemple de réglage
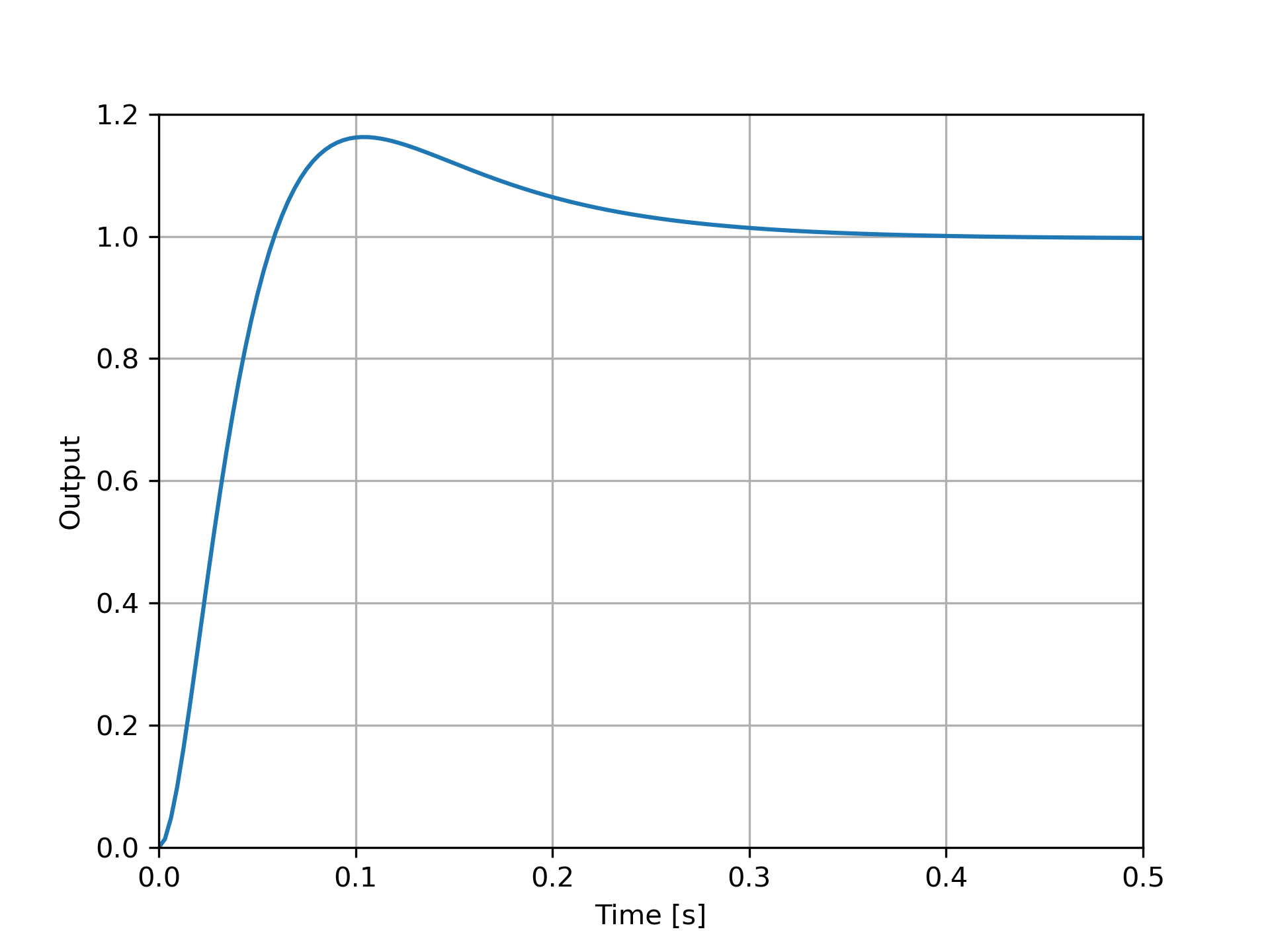
Les figures suivantes montrent comment régler un correcteur par avance de phase pour obtenir une pulsation de coupure à
La figure suivante présente l'allure de la réponse indicielle en boucle fermée après correction du système.