Analyse des Systèmes Linéaires et Invariants dans le Temps
Cette section introduit les systèmes SISO linéaires et invariants dans le temps (SLIT). Il présente leurs propriétés fondamentales (linéarité, invariance temporelle), leur modélisation par équations différentielles, et la réponse à des entrées quelconques via le produit de convolution. On y définit la causalité et la stabilité, puis on explore la réponse fréquentielle (Fourier) pour des signaux exponentiels, sinusoïdaux et périodiques. Des exemples illustrent la réponse impulsionnelle et indicielle, ainsi que les notions de gain, phase et déphasage.
Contexte
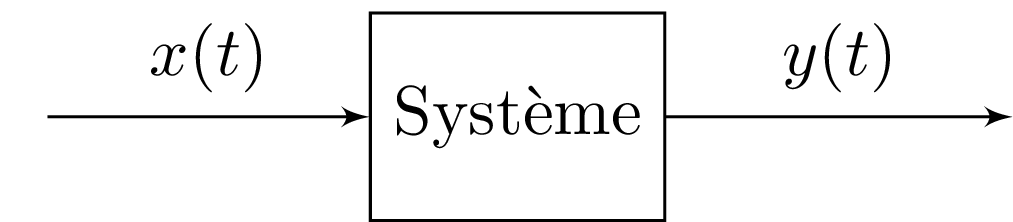
Soit un système SISO ayant pour entrée un signal
Systèmes SLIT
Considérons un système
Définition
Un système est dit linéaire et invariant dans le temps (SLIT), s'il respecte les 2 propriétés suivantes.
1. Linéarité
Considérons une entrée composée de la superposition de deux signaux:
En d'autres termes, si l'entrée est une combinaison linéaire de signaux, la sortie est donnée par la même combinaison linéaire des réponses correspondantes. Cette propriété est également appelée principe de superposition
2. Invariance dans le temps
Considérons que l'entrée d'un système SLIT est notée
Lorsque l'entrée du système SLIT est
En d'autres termes, les caractéristiques du système ne changent pas avec le temps.
Illustration
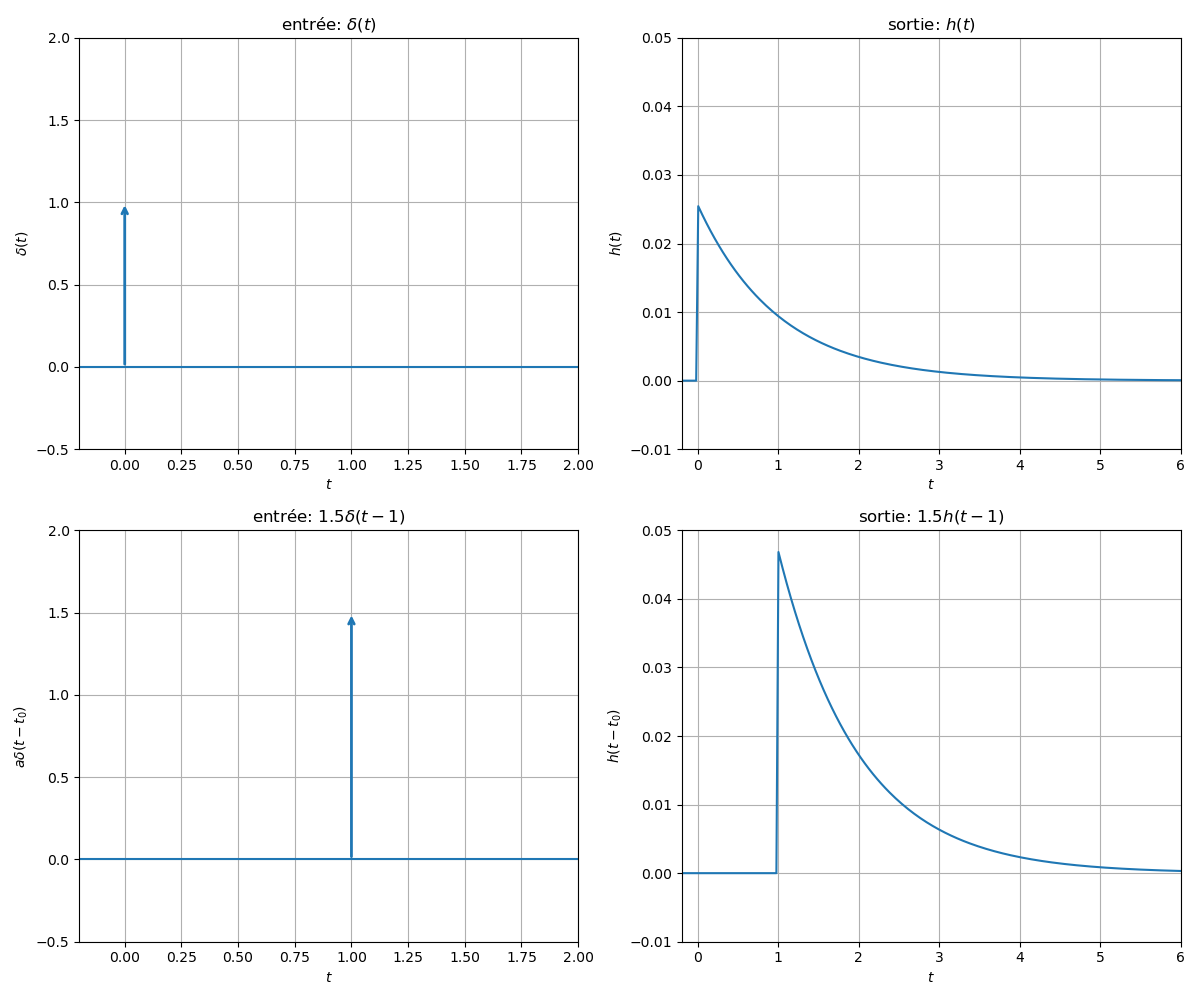
La figure suivante illustre ces 2 propriétés. Les sous-figures du haut présentent la réponse impulsionnelle du système. Les sous-figures du bas présentent la réponse temporelle du système lorsque l'entrée est une impulsion pondérée et décalée dans le temps. Pour un SLIT, la sortie du système pour une impulsion pondérée et décalée dans le temps s'obtient en pondérant et en décalant dans le temps la réponse impulsionnelle.
Modélisation
De nombreux systèmes SISO SLIT peuvent se modéliser sous la forme d'une équation différentielle linéaire à coefficients constants. Une équation différentielle linéaire à coefficients constants est un type spécifique d'équation différentielle ordinaire (ODE) où la fonction inconnue et ses dérivées apparaissent de manière linéaire, et les coefficients de ces termes sont des constantes.
L'expression générale d'une équation différentielle linéaire à coefficients constants est donnée par :
où :
est la sortie du système, est l'entrée du système, sont des coefficients constants associés aux dérivées de la sortie , sont des coefficients constants associés aux dérivées de l'entrée , est l'ordre de l'équation différentielle
Si le membre de droite de l'équation est nul (c-à-d
Exemple
Considérons le circuit RL suivant :
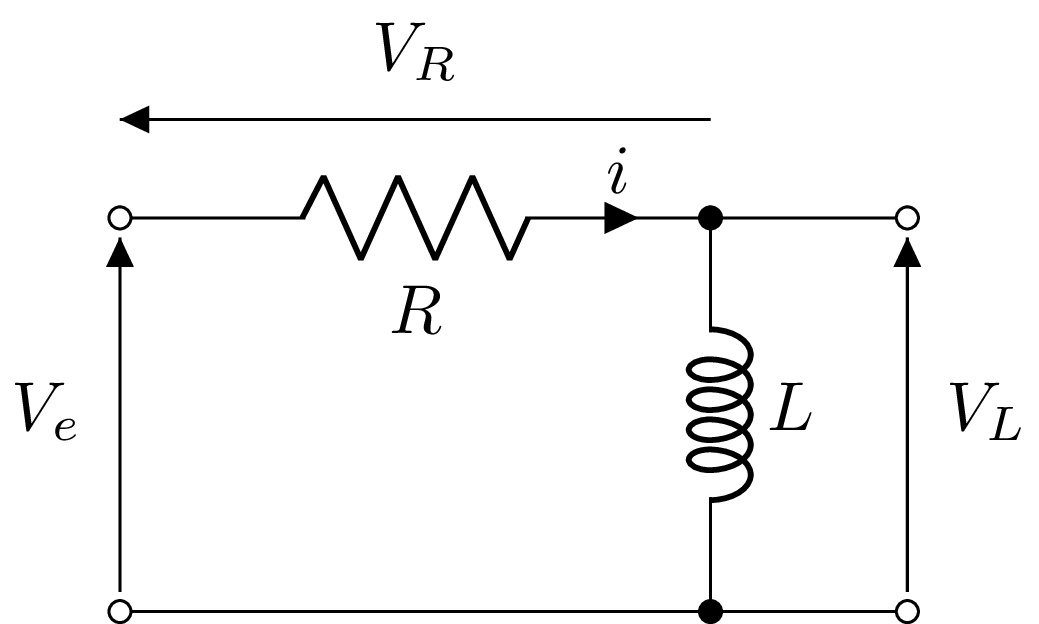
Pour ce circuit, la relation entre la tension d'entrée
Réponse du système à une entrée quelconque
Toute fonction d'entrée
où
Produit de convolution
Notons
Si l'entrée est une somme pondérée de deltas décalés, la sortie est la même somme pondérée des réponses impulsionnelles décalées. En utilisant la décomposition de
où
Démonstration
Notons
En décomposant l'entrée du système sous la forme
et en imposant la continuité et la linéarité de
En notant
Le produit de convolution présente plusieurs propriétés qui seront exposées explicitement dans le cours de traitement du signal.
Propriétés
- Commutativité :
Cette propriété indique que l'ordre des fonctions dans le produit de convolution n'affecte pas le résultat.
- Associativité
Cette propriété permet de regrouper les convolutions sans affecter le résultat final, facilitant ainsi le calcul de convolutions successives.
- Distributivité
La convolution d'une fonction avec une somme de deux fonctions est égale à la somme des convolutions de la fonction avec chacune des deux fonctions.
- Invariance par translation
Cette propriété indique que décaler une des fonctions d'entrée dans le temps décale également la sortie de la même quantité.
- Produit de convolution avec une delta de Dirac
La convolution d'une fonction
- Produit de convolution avec une constante
La convolution d'une fonction avec une constante est simplement la fonction multipliée par cette constante.
Causalité
Un système LTI est causal si la sortie du système à un instant donné dépend uniquement des valeurs présentes et passées de l'entrée, et non des valeurs futures. Par rapport à la réponse impulsionnelle
Autrement dit,
Stabilité
Un système linéaire et invariant dans le temps (LTI) est stable si et seulement si, pour toute entrée bornée, la sortie est également bornée. Par rapport à la réponse impulsionnelle
Exemple
Considérons un système de premier ordre de gain statique unitaire et de constante de temps unitaire. Il est possible d'établir que la réponse impulsionnelle de ce système est donnée par
Comme
Si l'entrée est un signal échelon unitaire
En substituant
Simulation Numérique
Il est possible d'obtenir simplement la réponse indicielle du système en utilisant python et le module control.
import matplotlib.pyplot as plt
from control.matlab import tf, step
K = 1
tau = 3
H = tf([K], [tau, 1])
s, t = step(H)
plt.plot(t, s)
plt.xlabel("temps [s]")
plt.ylabel("y(t)")
plt.grid()
plt.show()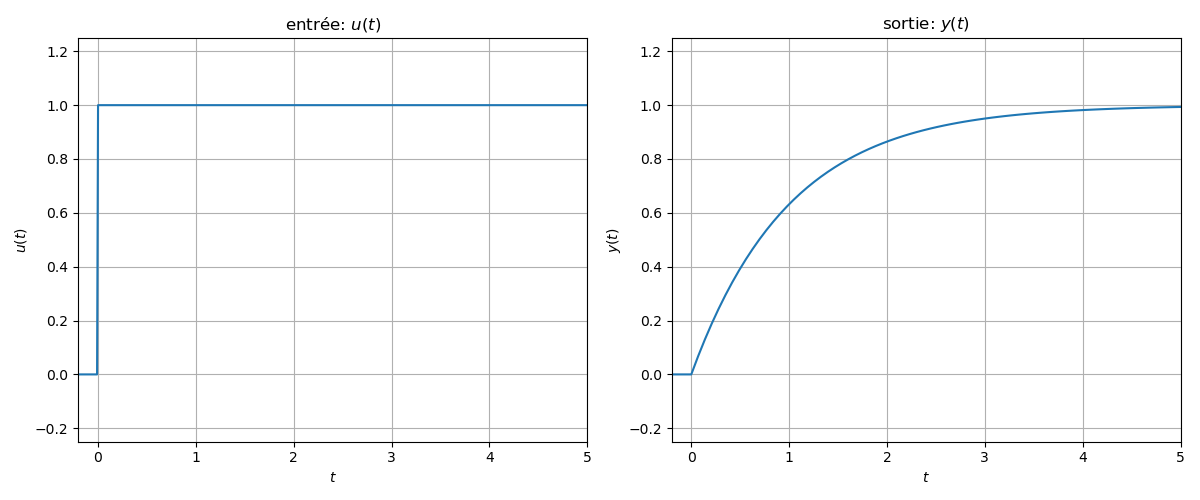
Réponse Fréquentielle
Les systèmes SLIT vont avoir un comportement singulier sur les signaux d'entrée composés d'exponentielles complexes. Ce comportement motive l'utilisation d'une représentation spécifique nommée réponse fréquentielle.
Cas des exponentielles complexes
Un signal exponentiel complexe de pulsation
Ce signal est periodique de période
où
correspond à la transformée de Fourier de la réponse impulsionnelle.
Démonstration
En utilisant la définition et la propriété de commutativité du produit de convolution, nous obtenons :
En d'autres termes, le système SLIT va uniquement multiplier l'exponentielle complexe en entrée par une constante qui ne dépend pas du temps. La réponse fréquentielle est généralement complexe et il est courant d'utiliser une représentation conjointe du module,
Cas des sinusoïdes
Un signal sinusoidal de pulsation
En utilisant la décomposition d'Euler, il est possible de décomposer
où
Démonstration
En utilisant la décomposition d'Euler, ce signal peut se décomposer sous la forme de deux exponentielles complexes:
Pour un système SLIT, la réponse à une exponentielle complexe
Pour une réponse impulsionnelle
En utilisant la décomposition module/argument
Cas des signaux périodiques
Un signal est dit périodique de période
où
En utilisant le principe de superposition des systèmes SLIT, il est possible de montrer que la sortie du système s'exprime sous la forme
Exemple
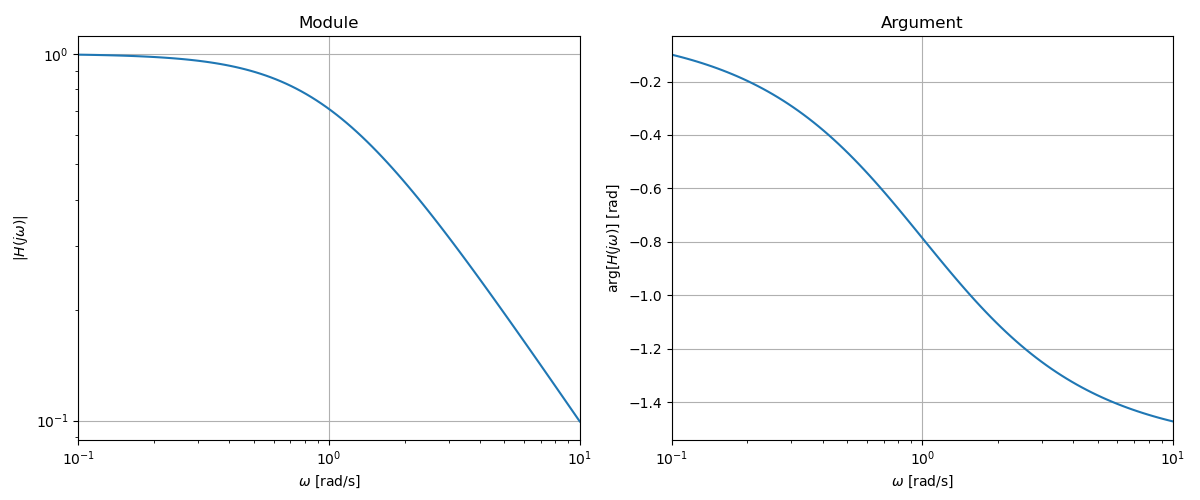
Considérons un système de premier ordre de gain statique unitaire et de constante de temps unitaire. La réponse impulsionnelle de ce système est donnée par :
La réponse fréquentielle
L'intégrale de
La figure suivante présente l'allure de la réponse fréquentielle.
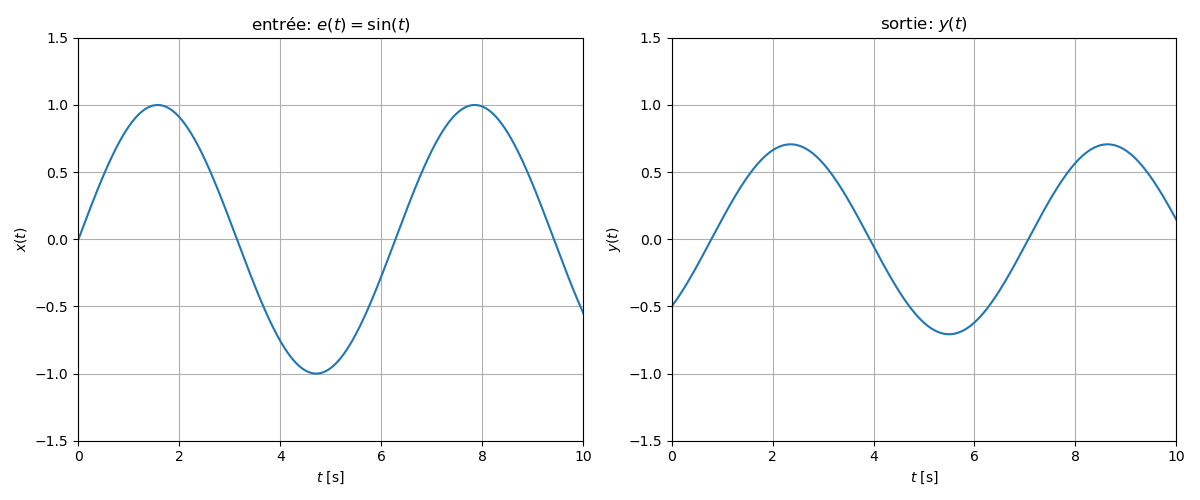
A titre d'illustration, la figure suivante montre la réponse du système lorsque l'entrée est une sinusoide de pulsation