Systèmes à Temps Discret
Ce chapitre présente les outils mathématiques et les méthodes d'analyse pour les systèmes à temps discret (systèmes échantillonnés).
Principe
Dans un système de commande numérique, un microprocesseur exécute l'algorithme de contrôle. Ce microprocesseur traite des signaux numériques
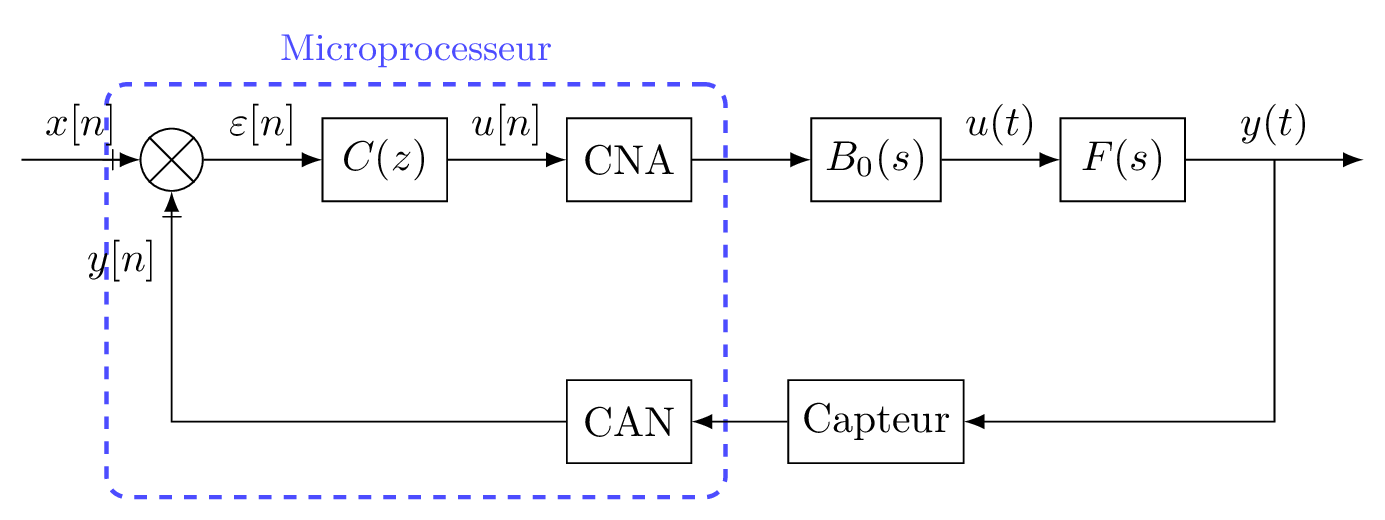
La chaîne de commande comprend :
Partie numérique (microprocesseur) :
- Un comparateur calculant l'erreur
- Un correcteur numérique
implémenté sous forme d'algorithme - Un CAN (Convertisseur Analogique-Numérique) échantillonnant la mesure
- Un comparateur calculant l'erreur
Partie analogique :
- Un CNA (Convertisseur Numérique-Analogique) reconstituant la commande
- Un bloqueur d'ordre 0
maintenant la valeur entre deux échantillons - Le système continu
à asservir - Un capteur mesurant la grandeur de sortie
Contenu
- Systèmes Linéaires - Transformée en Z, analyse des SLIT, systèmes de premier ordre
- Systèmes Échantillonnés - Échantillonnage, modélisation CNA/CAN et bloqueur d'ordre 0
- Correcteurs Numériques - Numérisation et correcteurs P, PI, PID numériques
Acquis d'Apprentissage Visés (AAV)
AAV1 : Modélisation d'un système en boucle fermée
À la fin du semestre, les étudiants seront capables de :
- Modéliser sous la forme d'une fonction de transfert en Z un système en boucle fermée comportant un correcteur numérique, des convertisseurs NA (avec ou sans BOZ) / AN, et un système continu à asservir.
AAV2 : Analyse de la réponse temporelle
À la fin du semestre, les étudiants seront capables de :
- Déterminer analytiquement la réponse temporelle d'un système SISO SLIT à temps discret lorsqu'un signal numérique est envoyé à son entrée.
- Caractériser les principales propriétés de cette réponse temporelle :
- Valeurs limites (initiale / finale)
- Caractérisation des oscillations
- Valeur du premier dépassement relatif
- Temps de réponse
AAV3 : Numérisation de correcteurs analogiques
À la fin du semestre, les étudiants seront capables de :
- Numériser un correcteur analogique usuel (P, PI, PID) en utilisant une stratégie de discrétisation.
- Exprimer la version numérisée sous la forme d'une fonction de transfert en Z ou d'une équation de récurrence.
AAV4 : Synthèse de correcteurs numériques
À la fin du semestre, les étudiants seront capables de :
- Synthétiser un correcteur numérique par une méthode fréquentielle pour asservir un système SLIT à temps continu en respectant les contraintes d'un cahier des charges.
- Valider le correcteur avec un logiciel de simulation et critiquer les performances obtenues en termes de :
- Stabilité
- Précision (écart statique)
- Performances dynamiques (rapidité, dépassement)
- Robustesse (influence des perturbations extérieures)