Analyse des Systèmes de Premier Ordre
Cette section est consacré aux systèmes passe-bas du premier ordre. Après la modélisation (équation différentielle, fonction de transfert, pôles/zéros), on étudie leurs réponses temporelles : impulsionnelle (exponentielle décroissante) et indicielle (croissance exponentielle vers la valeur finale). Les propriétés comme la constante de temps et le temps de réponse à ±5 % sont détaillées. La partie fréquentielle introduit les représentations en module et phase, puis les diagrammes de Nyquist, Bode et Black-Nichols. Les points remarquables (pulsation de coupure, -3 dB, phase -45°) sont clairement identifiés.
Modélisation d'un système passe-bas (LP)
Equation Différentielle
Un système LTI peut être décrit par une équation différentielle liant l'entrée
: gain statique, : constante de temps (s).
Fonction de Transfert
Pour faciliter l'analyse des systèmes LTI, il est courant de recourir à la notion de fonction de transfert. La fonction de transfert d'un système Passe-bas (LP) d'ordre 1 est donnée par:
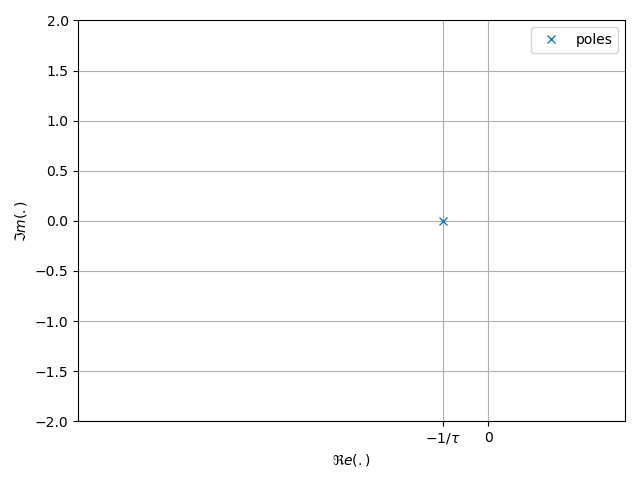
Pôles et Zéros
Un système Passe-bas (LP) d'ordre 1 possède :
- un unique pôle négatif en
, - aucun zéro.
La figure suivante présente le diagramme des pôles et des zéros d'un filtre passe-bas de premier ordre. Ce système possède un unique pôle situé sur l'axe des réels. Lorsque
Réponse Temporelle
Cette section montre comment obtenir la sortie du système pour différents signaux en entrée.
Réponse Impulsionnelle
La réponse impulsionnelle correspond à la réponse du système lorsque l'entrée est une impulsion de Dirac d'amplitude
Démonstration
Dans le domaine de Laplace, une impulsion de Dirac d'amplitude
On obtient donc :
En utilisant la transformée inverse de Laplace, on reconnaît que la fonction suivante dans le domaine temporel :
Ainsi, on obtient directement :
où
Exemple
La figure suivante présente la réponse impulsionnelle d'un filtre passe-bas de premier ordre lorsque l'entrée est une impulsion d'amplitude
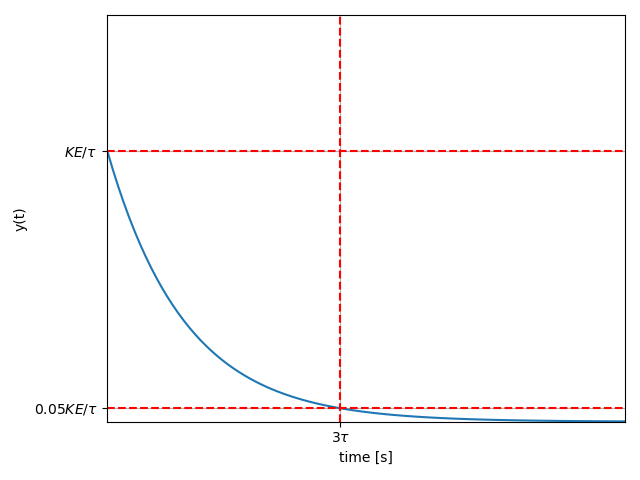
Il est possible d'établir que la réponse impulsionnelle présente les propriétés suivantes:
- Valeur initiale:
, - Valeur finale:
, - Valeur en
, .
Réponse Indicielle
La réponse indicielle correspond à la réponse du système lorsque l'entrée est un échelon d'amplitude
Démonstration
Dans le domaine de Laplace, la sortie s'exprime sous la forme :
En utilisant une décomposition en éléments simples, nous obtenons :
La constante
La constante
Ainsi,
En utilisant la transformée de Laplace inverse, nous obtenons finalement :
Exemple
La figure suivante présente l'allure de la réponse indicielle lorsque l'entrée est un échelon d'amplitude
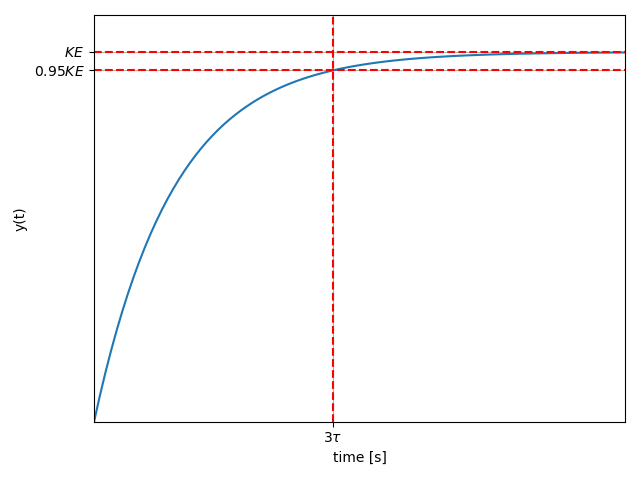
La réponse indicielle suit une exponentielle croissante et se stabilise vers une valeur finie. Il est possible de démontrer les propriétés suivantes:
- Valeur initiale :
, - Valeur finale :
, - Temps de réponse à
: avec s, - Pas de dépassement :
.
Temps de réponse
Pour un système de premier ordre, le temps de réponse à
Réponse Fréquentielle (Harmonique)
Expression
La réponse fréquentielle d'un système passe-bas (LP) de premier ordre est donnée par :
avec
- Partie réelle / Partie imaginaire:
- Module / argument:
Partie Réelle et Partie Imaginaire
Pour un système passe-bas de premier ordre, la partie réelle et imaginaire de la réponse fréquentielle s'expriment sous la forme suivante:
- Partie réelle:
- Partie imaginaire :
Module et Argument
Pour un système passe-bas de premier ordre, le module et l'argument de la réponse fréquentielle s'expriment sous la forme:
- Module :
- Argument:
Notons que lorsque
Diagramme de Nyquist
Le diagramme de Nyquist présente l'ensemble la partie imaginaire
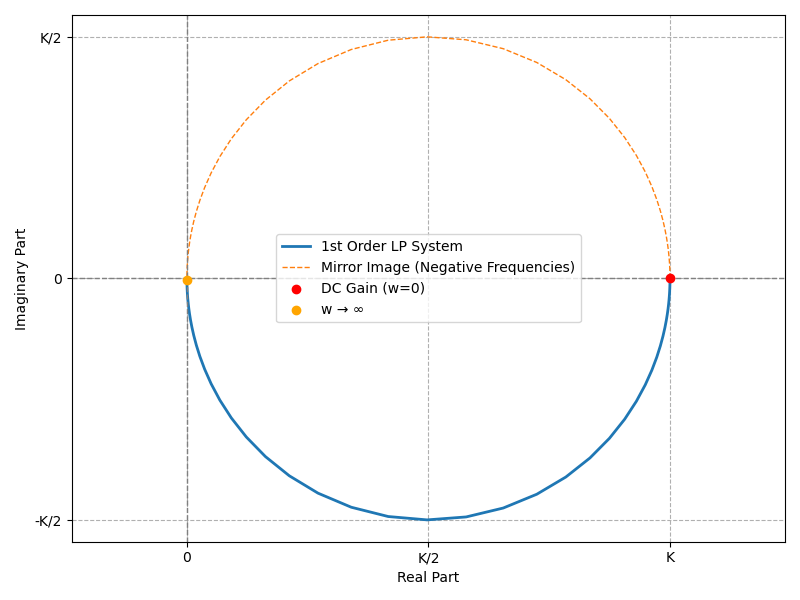
La courbe résultante dans le plan complexe est une trajectoire semi-circulaire partant de
Diagramme de Bode
Le diagramme de Bode est composé de deux graphiques :
- le premier graphique présente le module
(en dB) en fonction sur une échelle logarithmique. - le second graphique présente l'argument
(en deg) en fonction sur une échelle logarithmique.
Les figures suivantes présentent l'allure du module et de l'argument pour un système passe-bas de premier ordre.
Représentation du module
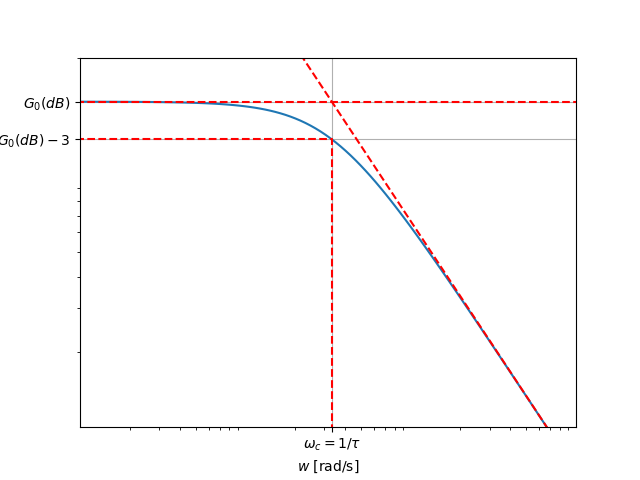
Le module évolue de
Pulsation de coupure
Pour un système de premier ordre, la pulsation de coupure à
Représentation de l'argument
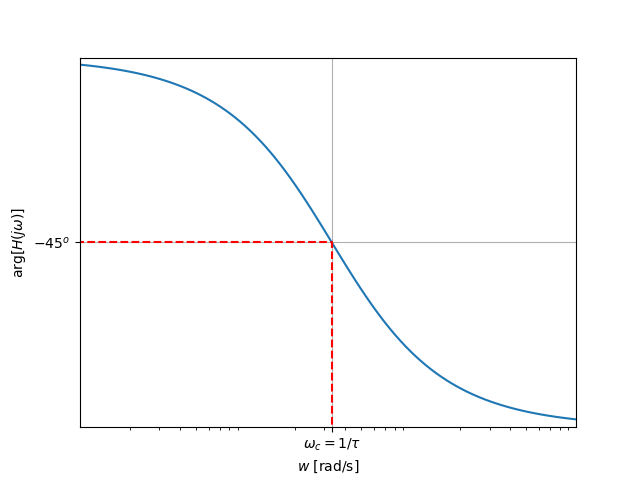
Lorsque
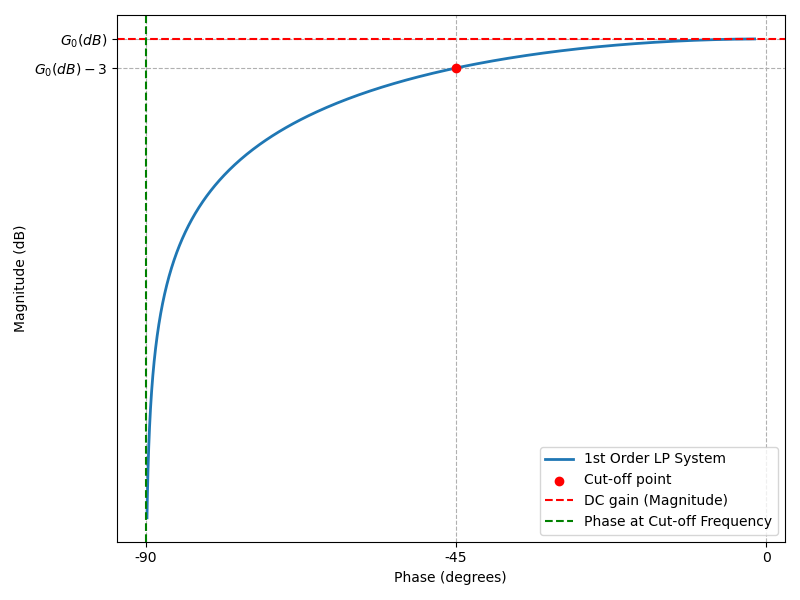
Diagramme de Black-Nichols
Le diagramme de Black-Nichols est une représentation où l'on trace l'argument
La figure suivante présente le diagramme de Black-Nichols pour un système passe-bas de premier ordre.
Pour