Analyse des Systèmes de Second Ordre
Cette section traite les systèmes passe-bas du second ordre, décrits par une équation différentielle dépendant de la pulsation propre
Modélisation d'un système passe-bas (LP)
Equation Différentielle
Pour un système passe-bas d'ordre 2, le lien entre l'entrée et la sortie est donnée par l'équation différentielle suivante:
: gain statique, : coefficient d'amortissement, : pulsation propre ou naturelle (en rad/s).
Notons que certains ouvrages préfèrent utiliser, au lieu du paramètre
Fonction de Transfert
La fonction de transfert d'un système passe-bas de second ordre est donnée par :
Pôles et Zéro
Les pôles
- Régime apériodique (
): Lorsque , le système présente deux pôles réels d'expression :
- Regime critique (
): Lorsque , le système présente un pôle réel double
- Régime pseudo-périodique (
): Lorsque , le système présente une paire de pôles complexes-conjugués
Identification lorsque
Lorsque
Exemple
La figure suivante présente le diagrammes des pôles et des zéros pour 3 systèmes de second ordre avec des coefficients d'amortissement différents.
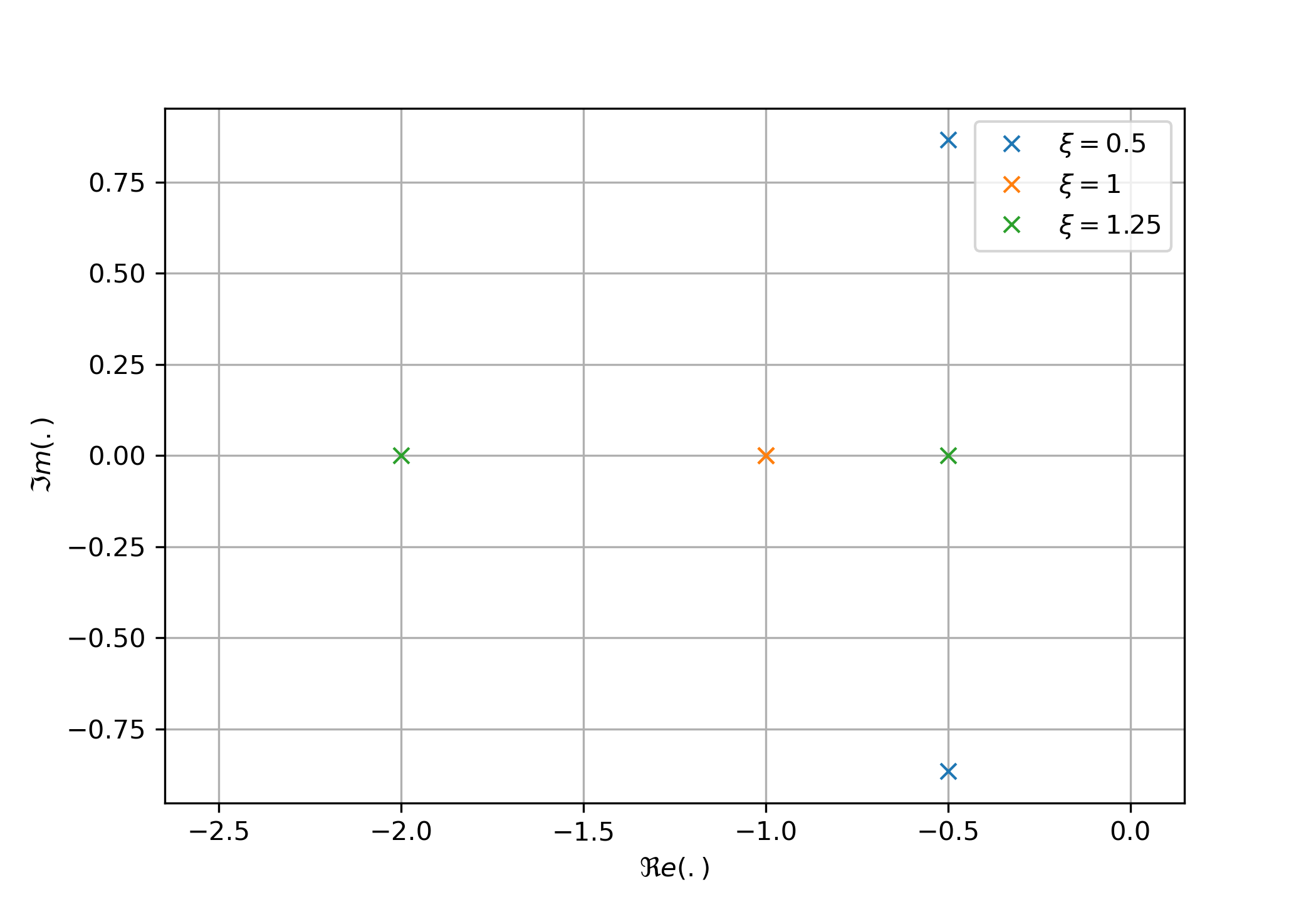
Lorsque
Réponse Indicielle
L'allure de la réponse indicielle est dictée par la géométrie des pôles. Nous obtenons 3 cas de figures.
Regime Apériodique (
Lorsque
avec
Démonstration
Dans le domaine de Laplace, la sortie s'exprime sous la forme :
avec
En utilisant une décomposition en éléments simples, nous obtenons :
avec :
En utilisant la transformée de Laplace inverse, nous obtenons alors :
Il est possible de démontrer les propriétés suivantes:
- Valeur initiale :
, - Valeur finale :
, - Temps de réponse à
: Pas de formule simple, utilisation des abaques. - Pas de dépassement :
.
Pôle dominant
Si
Exemple
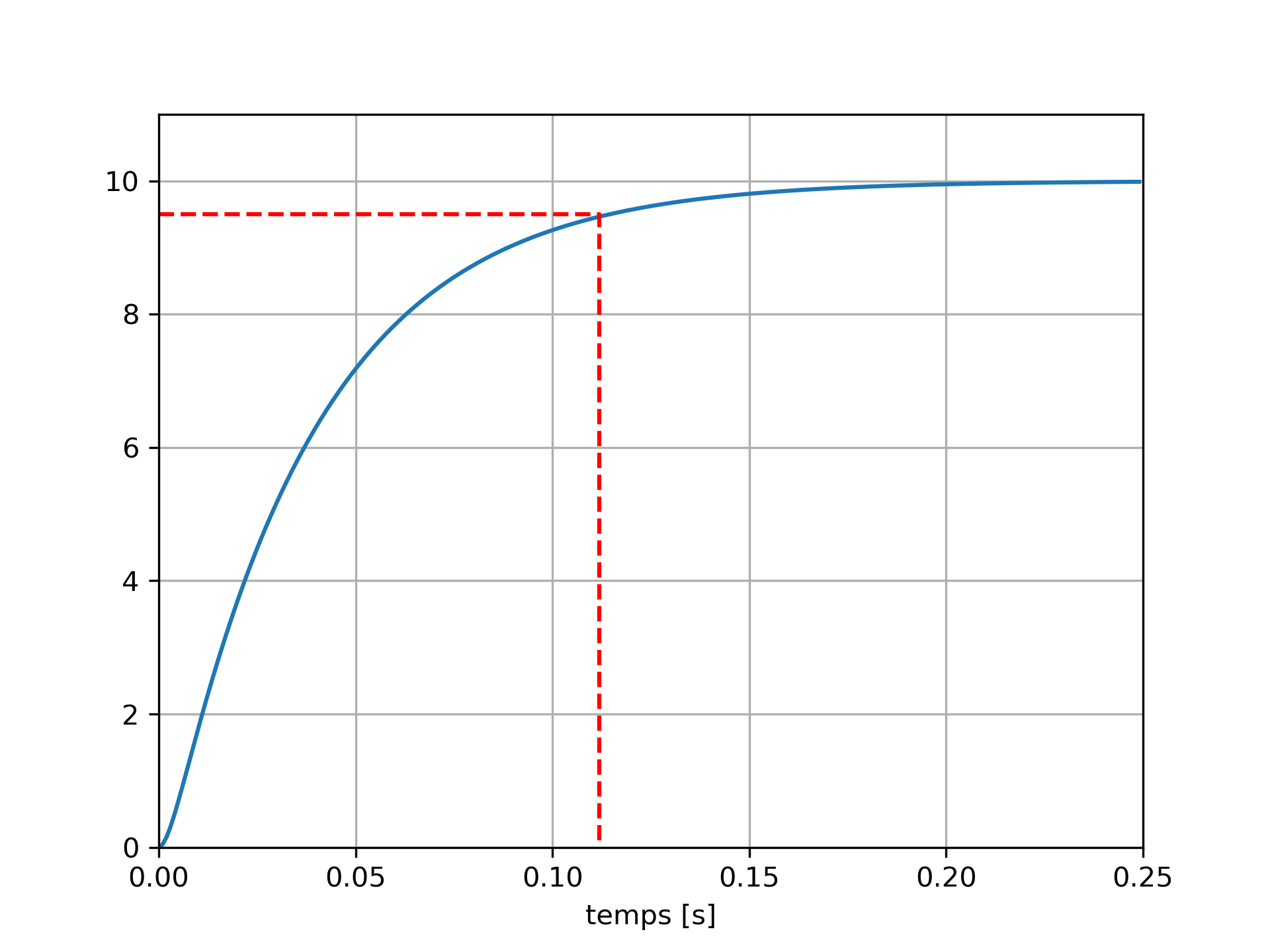
La figure ci-dessus présente la réponse indicielle (
Régime Critique (
Lorsque
avec
Démonstration
Dans le domaine de Laplace, la sortie s’exprime sous la forme :
avec
La fonction
avec :
, , .
En utilisant la transformée de Laplace inverse, nous trouvons :
Il est possible de démontrer les propriétés suivantes:
- Valeur initiale :
, - Valeur finale :
, - Temps de réponse à
: utilisation des abaques. Pour , . - Pas de dépassement :
.
Exemple
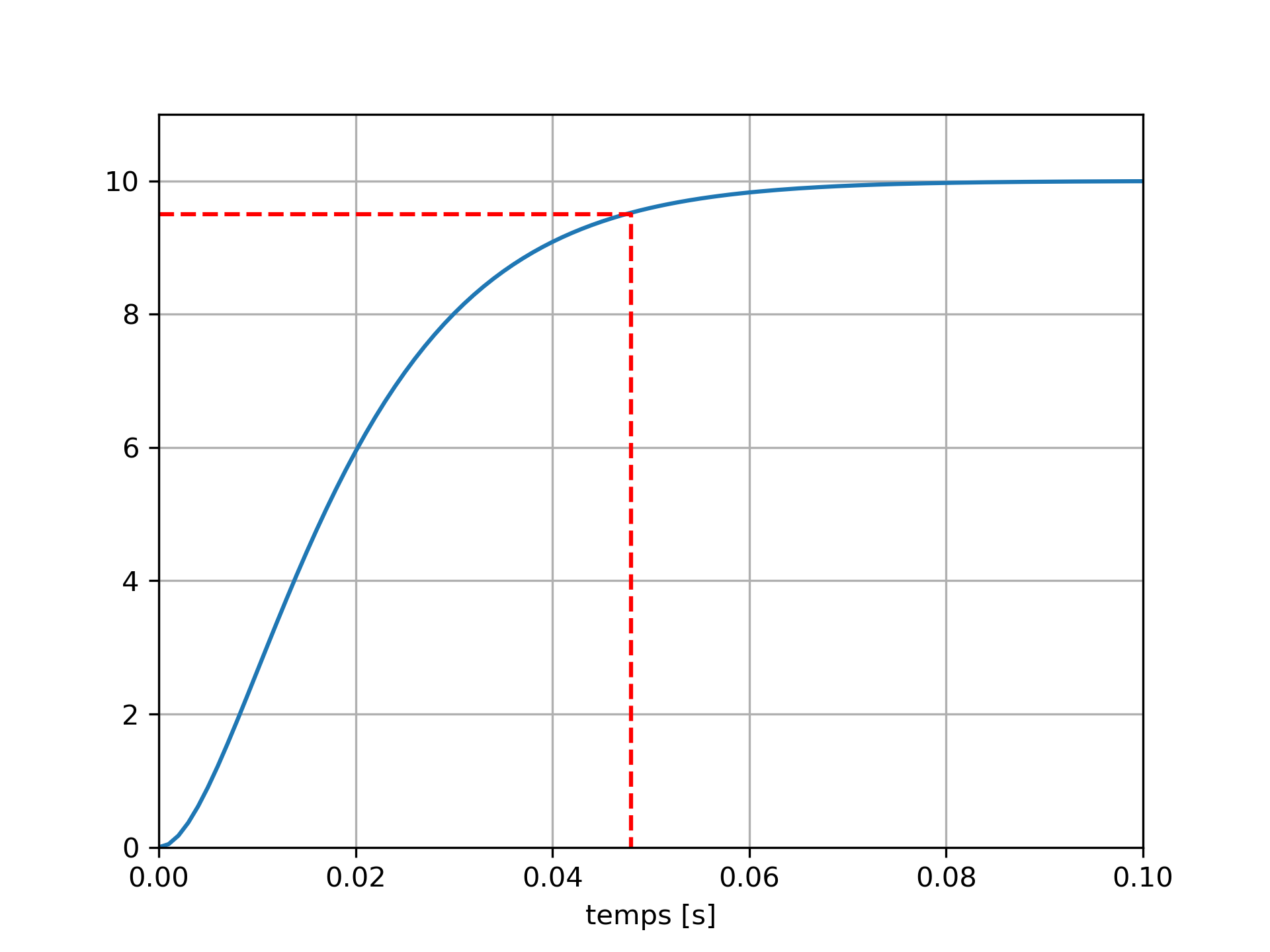
La figure ci-dessous présente la réponse indicielle (
Regime Pseudo-Périodique (
La réponse indicielle s'exprime sous la forme :
où
Démonstration
Dans le domaine de Laplace, la sortie s’exprime sous la forme :
Lorsque
En posant
Par identification, nous obtenons :
En identifiant par rapport aux différentes puissances de
Après résolution du système, nous obtenons
Il est possible de démontrer les propriétés suivantes:
- Valeur initiale :
, - Valeur finale :
, - Temps de réponse à
: Pas de formule simple, utilisation des abaques. - Présence d'oscillations à la pseudo-pulsation (rad/s):
- Premier Dépassement relatif :
, utilisation des abaques.
Pseudo-période
Lorsque
Exemple
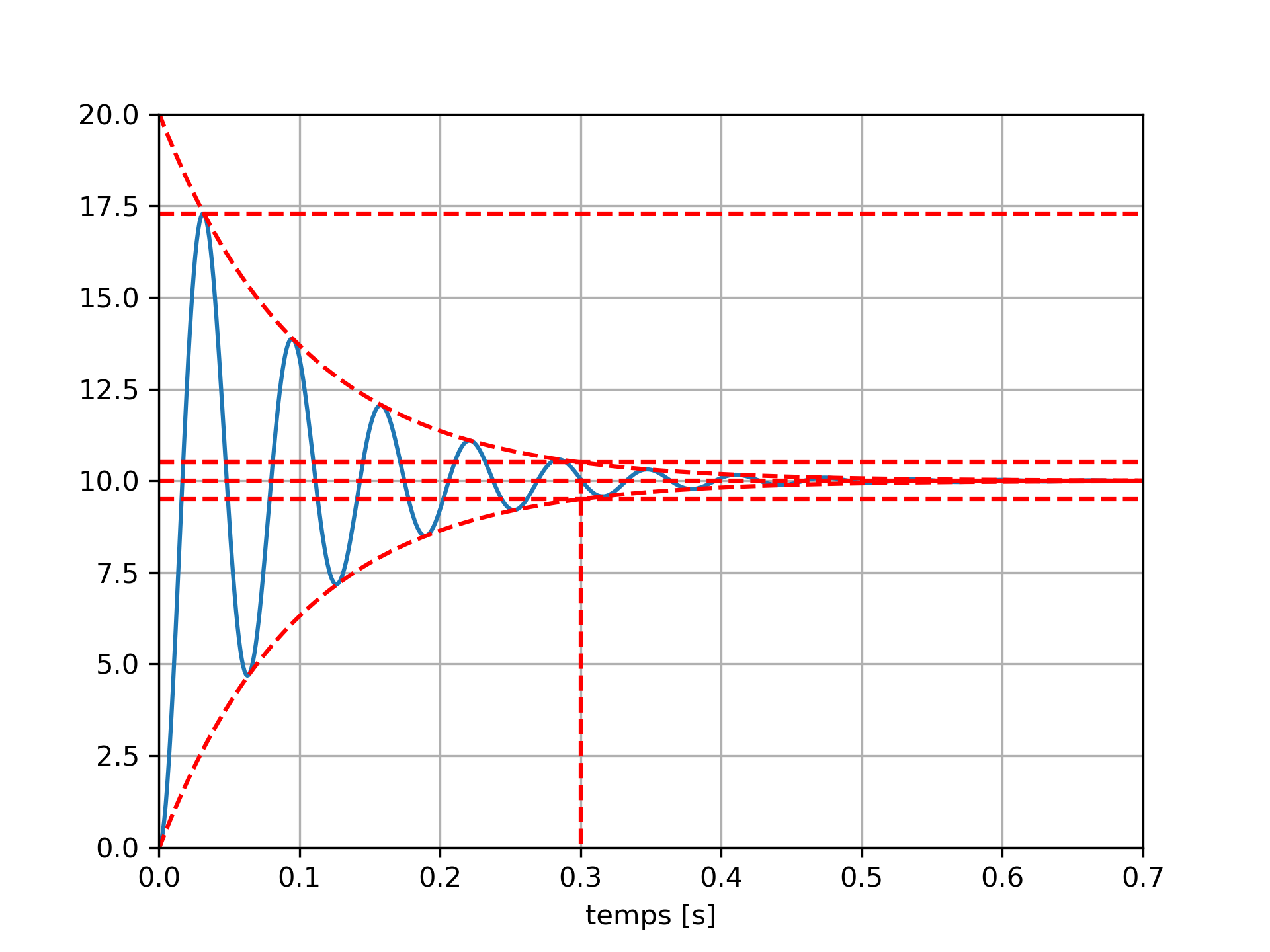
La figure ci-dessus présente la réponse indicielle (
Réponse Fréquentielle
Expression
La réponse fréquentielle d'un système passe-bas de second ordre est donnée par :
où
Partie Réelle et Partie Imaginaire
Pour un système passe-bas de second ordre, la partie réelle et imaginaire de la réponse fréquentielle s'expriment sous la forme suivante:
- Partie réelle:
- Partie imaginaire :
Module et Argument
Pour un système passe-bas de second ordre, le module et l'argument de la réponse fréquentielle s'expriment sous la forme:
- Module:
- Argument :
où
Point Remarquable
A la pulsation
Résonance
Lorsque
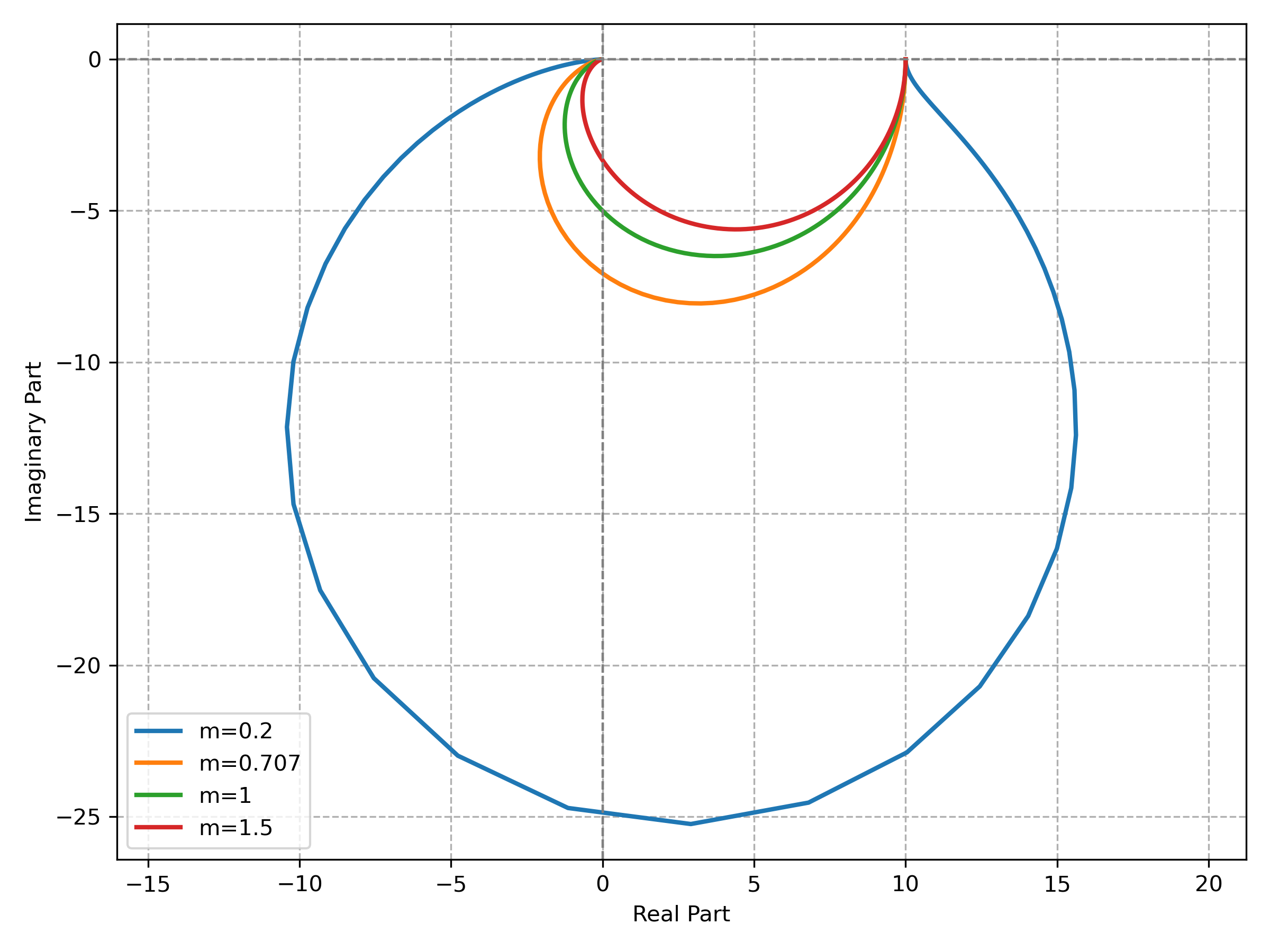
Diagramme de Nyquist
La figure ci-dessus présente les diagrammes de Nyquist de plusieurs systèmes de second ordre avec
Diagramme de Bode
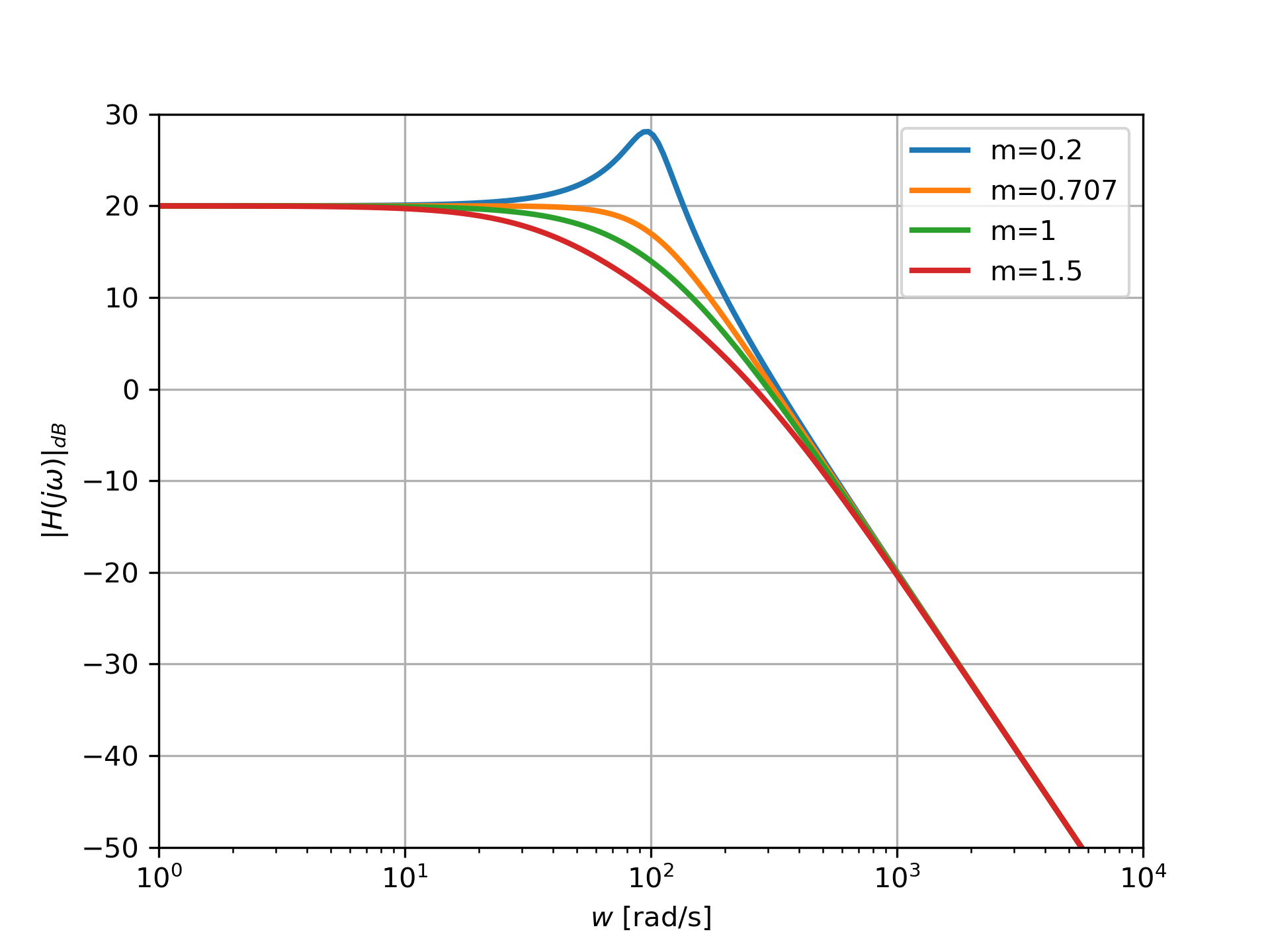
Représentation du module
La figure ci-dessus présente le module du diagramme de Bode de plusieurs systèmes de second ordre avec
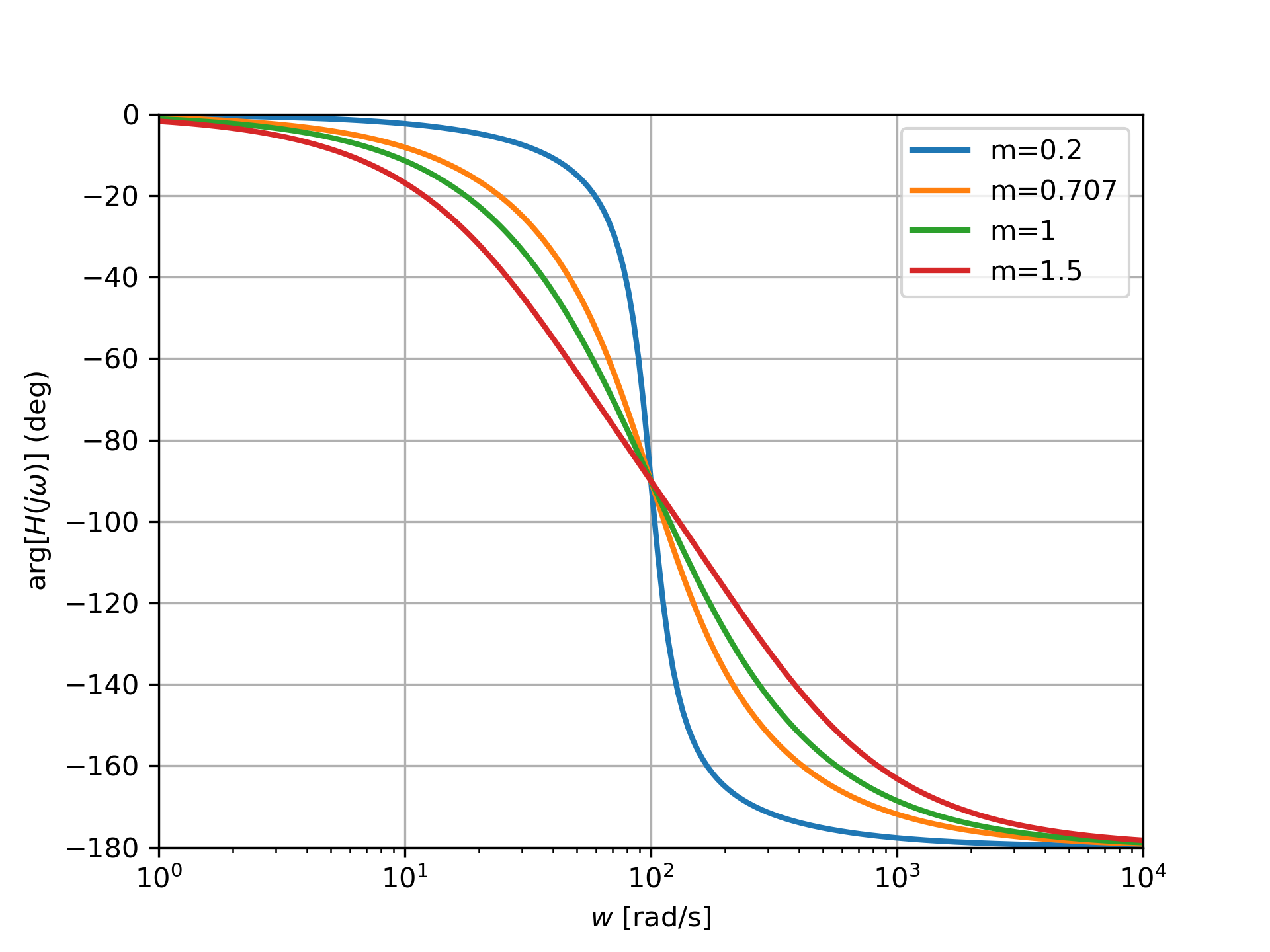
Représentation de l'argument
La figure ci-dessus présente le module du diagramme de Bode de plusieurs systèmes de second ordre avec
Diagramme de Black-Nichols
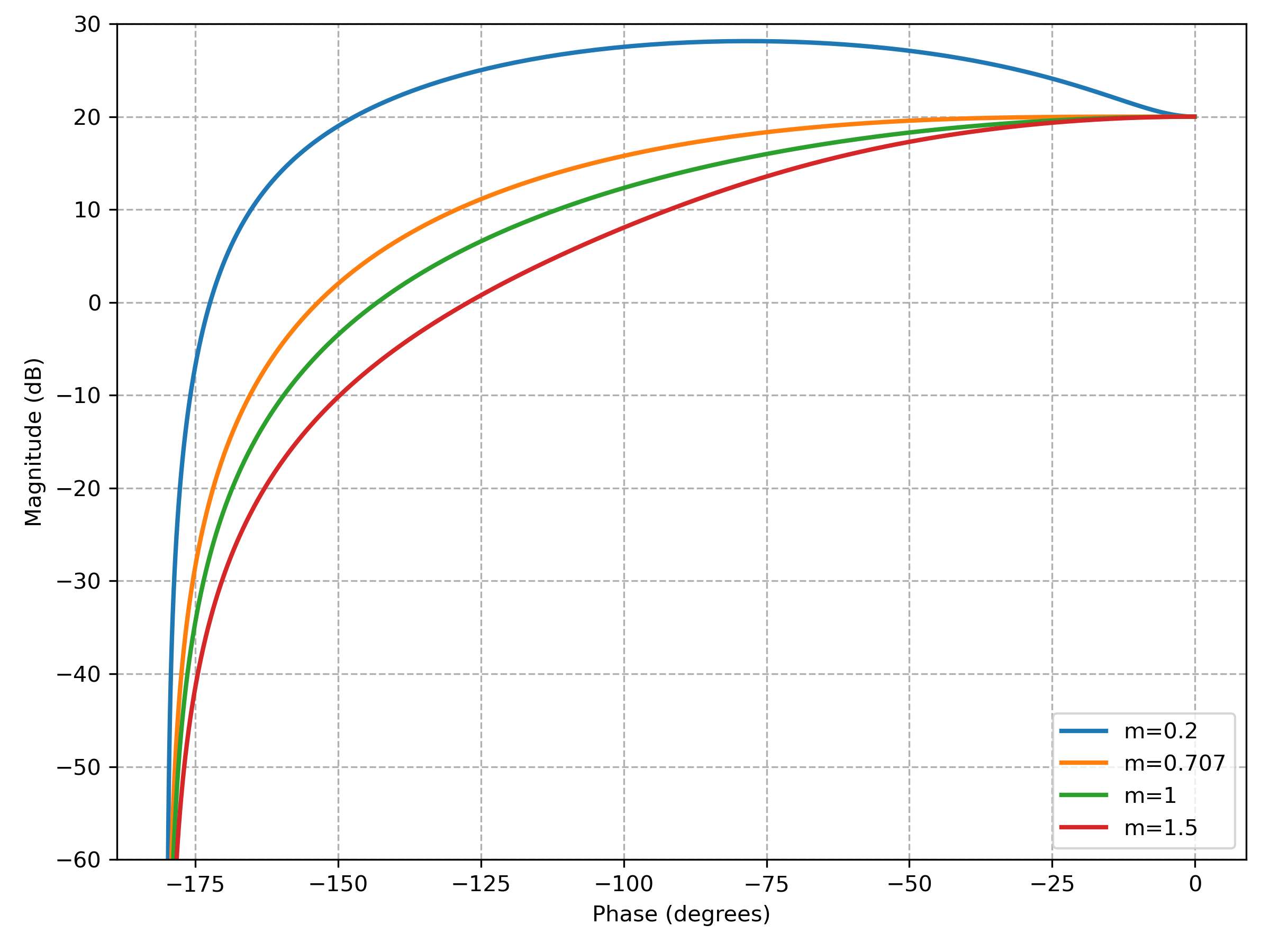
La figure suivante présente les diagrammes de Black-Nichols de plusieurs systèmes passe-bas de second ordre avec