Stabilité des Systèmes en Boucle Fermée
Cette section introduit la notion de stabilité des systèmes en boucle fermée. Après avoir défini la stabilité BIBO et établi son lien avec la position des pôles dans le plan complexe, il montre comment vérifier la stabilité d’un système grâce au lieu de Black de la boucle ouverte. Le critère du revers est présenté comme outil graphique pour conclure sur la stabilité, complété par les notions de marges de gain et de phase permettant d’évaluer la robustesse du système.
Objectif
Dans ce chapitre, nous montrons comment analyser la stabilité d'un système en boucle fermée à partir du lieu de Black de la boucle ouverte.
Stabilité BIBO
Un système est dit BIBO stable si lorsque son entrée est bornée, sa sortie l'est également. Pour les systèmes continus, un système est BIBO stable si et seulement si sa réponse impulsionnelle est absolument intégrable c-à-d :
Condition sur les pôles
La fonction de transfert d'un système d'ordre
où
Au niveau temporel, chaque pôle
- à une composante du type
pour les pôles réels , - à une composante du type
pour les pôles complexes-conjugués .
Nous constatons alors que, pour qu'un système soit stable, les arguments des termes exponentiels doivent être négatifs. Cette propriété permet de relier directement la notion de stabilité aux pôles du système
Stabilité
Un SLIT continu est BIBO stable si la partie réelle de tous ses pôles est négative c-à-d que pour tout
Exemples
Les figures suivantes présentent les diagrammes des pôles et des zéros de deux systèmes, ainsi que leur réponse indicielle (avec
Système Stable
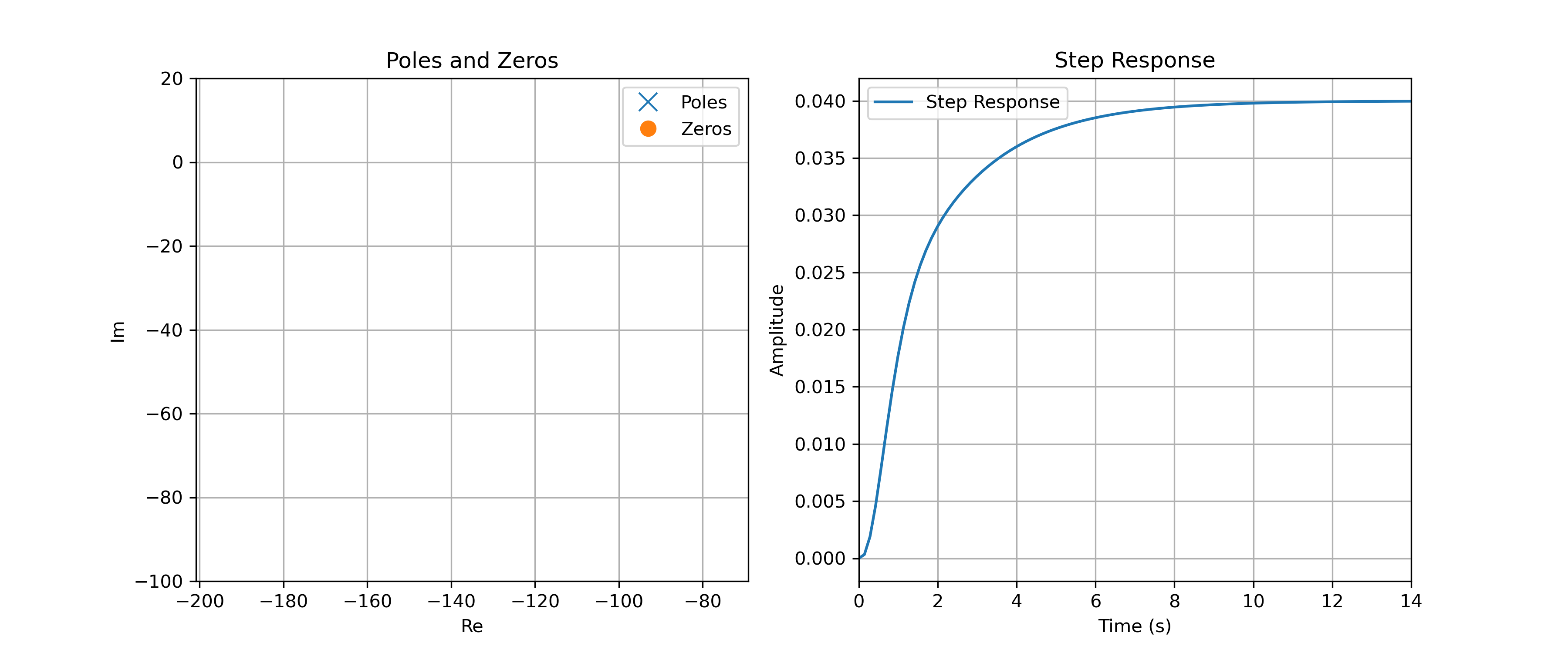
Dans la première figure, l'ensemble des pôles est situé sur le demi-plan gauche, c-à-d que tous les pôles ont une partie réelle négative. L'allure de la réponse indicielle permet de confirmer que le système est bien stable.
Système Instable
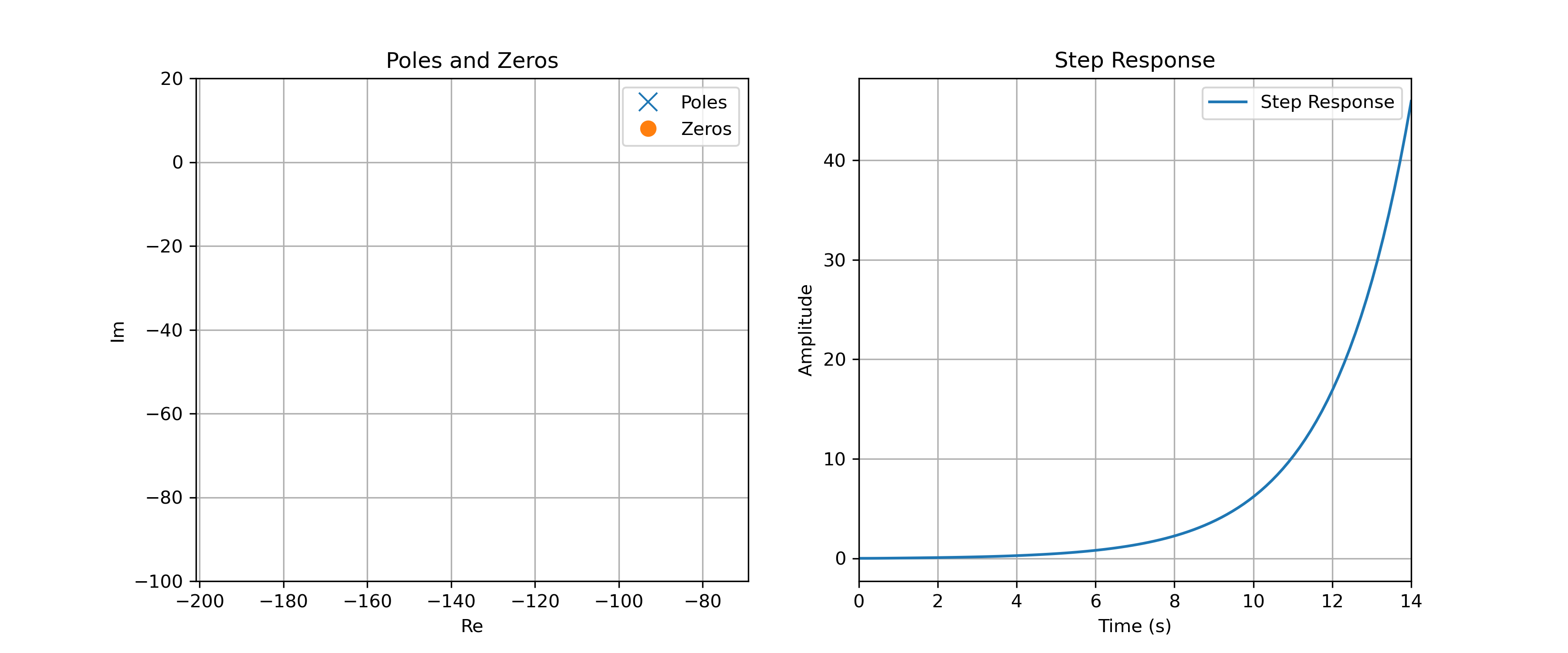
Dans la seconde figure, un pôle possède une partie réelle positive (
Cas de la Boucle fermée
Pour analyser la stabilité du système en boucle fermée
Lieux de Black et critère du revers
Le diagramme de Black-Nichols du système en boucle ouverte
Critère du revers
Pour qu’un système à retour unitaire soit stable en boucle fermée, le lieu de Black du système en boucle ouverte
Exemples
Les figures suivantes présentent les lieux de Black de deux systèmes de 3ᵉ ordre, ainsi que leur réponse indicielle en boucle fermée (avec
Système stable en boucle fermée
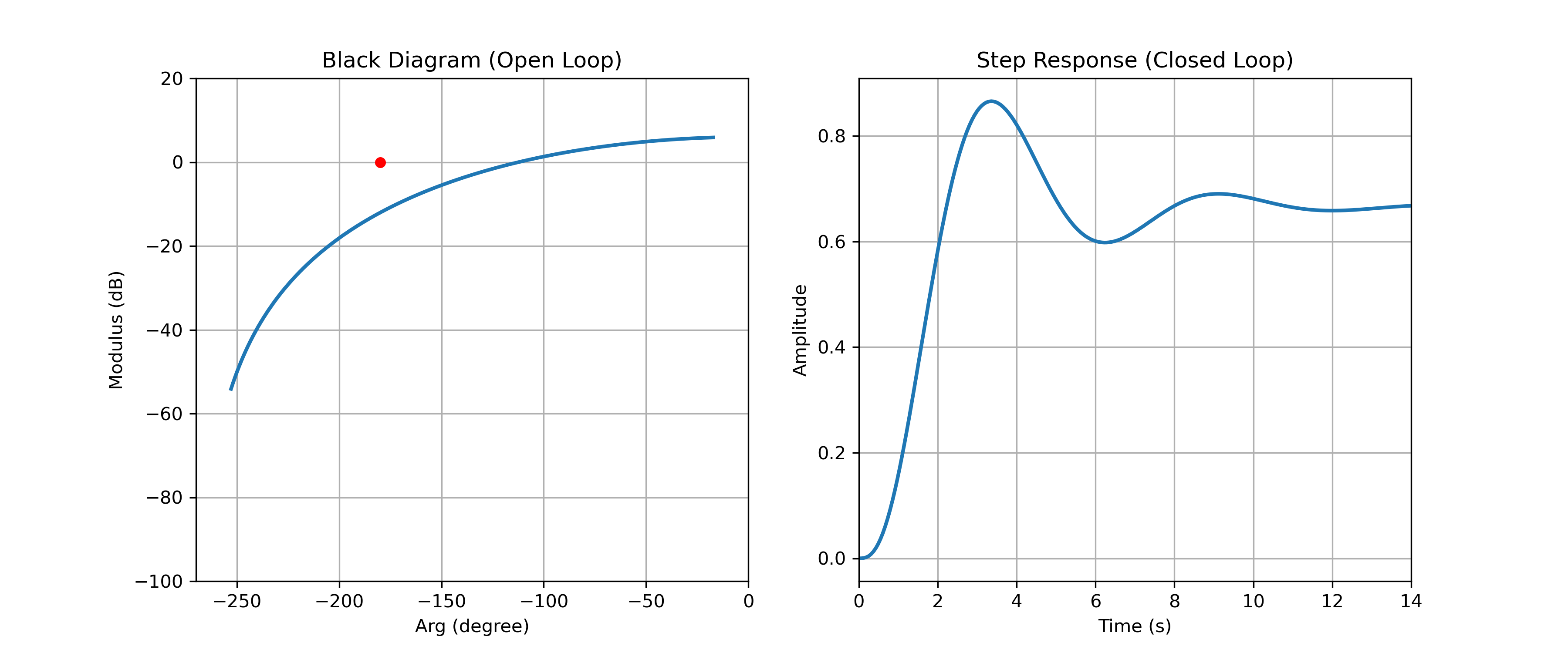
La figure ci-dessus présente le lieu de Black d'un système en boucle ouverte
Système instable en boucle fermée
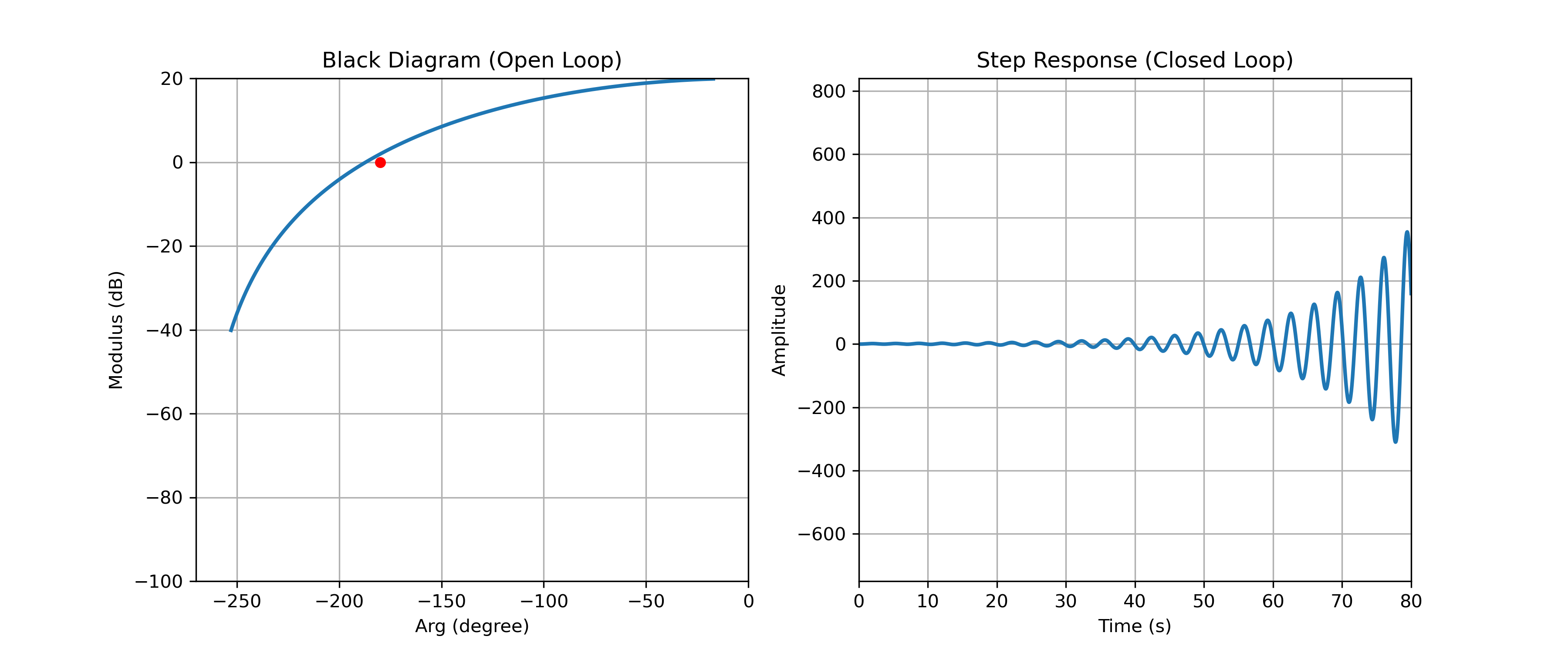
La figure ci-dessus présente le lieu de Black d'un système en boucle ouverte
Marges de Gain et de Phase
Le critère de stabilité est un critère binaire (le système est stable ou non) et il est souvent préférable de recourir à des critères numériques pour caractériser la stabilité "relative" d'un système en boucle fermée, offrant ainsi une sécurité face aux erreurs de modélisation.
Pour caractériser la stabilité d'un système en boucle fermée, deux critères sont couramment utilisés :
- Marge de Phase
: Distance en degrés par rapport au point critique lorsque . - Marge de Gain
: Distance en dB par rapport au point critique lorsque .
Lorsqu'un système est stable en boucle fermée, ces deux marges sont positives.
Exemple
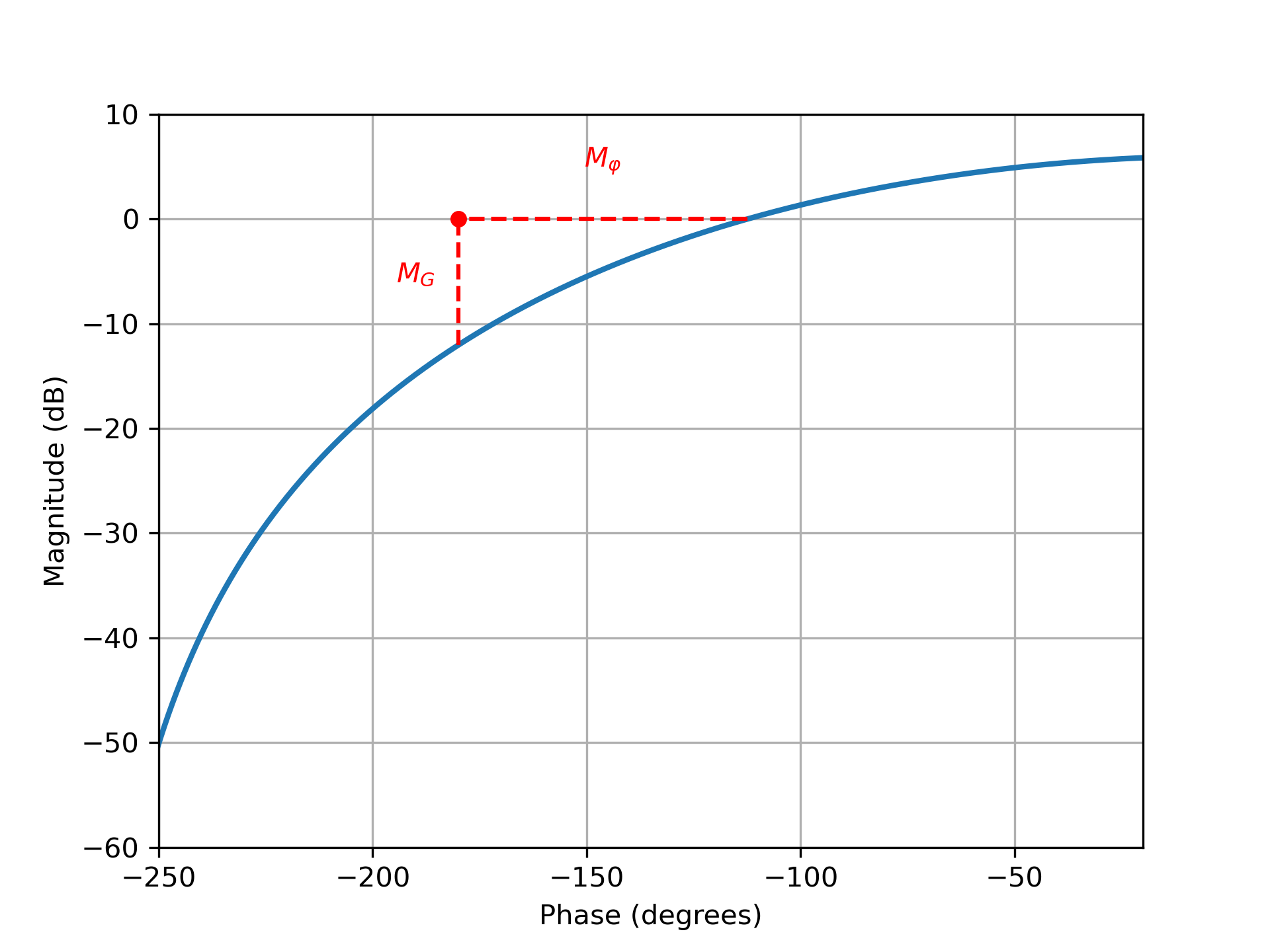
À titre d'exemple, la figure ci-dessus présente le lieu de Black d'un système de 3ᵉ ordre. Ce système est stable en boucle fermée. Concernant les marges, nous obtenons une marge de Gain
Correction
Pour gagner en stabilité en boucle fermée, une stratégie de correction possible consiste à "apporter" de la phase en boucle ouverte (translation du lieu de Black vers la droite).