Liste des correcteurs
Contexte
Pour corriger un système, une stratégie possible consiste à ajouter un correcteur dans la boucle ouverte.
: fonction de transfert du correcteur, : fonction de transfert du système à corriger, : fonction de transfert de la boucle ouverte.
Dans ce chapitre, nous allons considérer différents correcteurs usuels.
Correcteurs Usuels
Correcteur Proportionnel (P)
Fonction de transfert
La fonction de transfert d'un correcteur proportionnel est donnée par :
: gain du correcteur.
Avantages et inconvénients
Avantages :
- Simple à implémenter et à régler.
- Augmente la rapidité de réponse en boucle fermée.
Inconvénients :
- N'élimine pas l'erreur statique (erreur résiduelle possible pour une entrée en échelon).
Correcteur Proportionnel-Intégral (PI)
Fonction de transfert
La fonction de transfert d'un correcteur proportionnel-intégral est donnée par :
: gain du correcteur proportionnel, : gain de l'action intégrale.
Diagramme de Bode
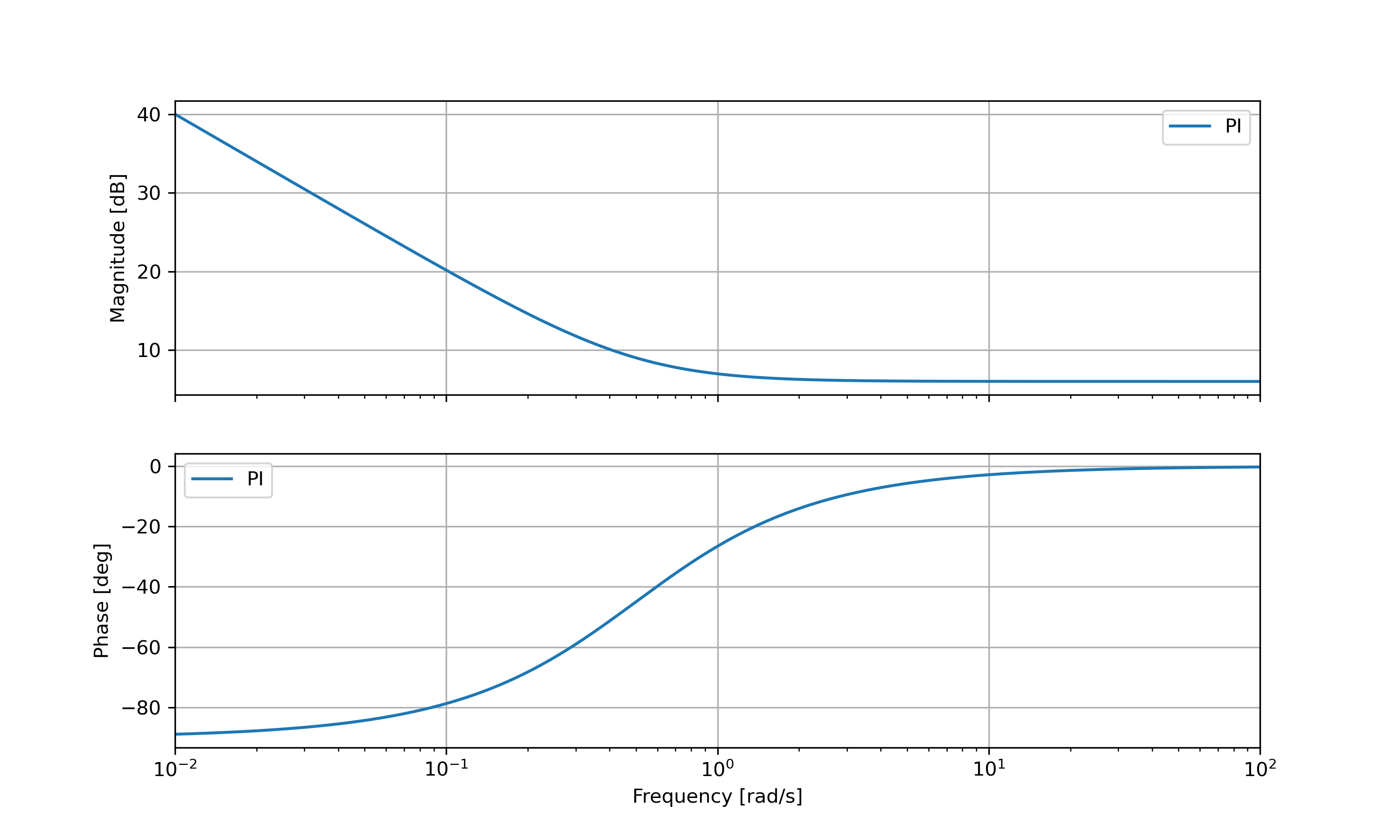
L'action intégrale du correcteur PI permet d'apporter du gain en basse-fréquence (diminution de l'erreur en régime permanent). Ce correcteur enlève néanmoins de la phase en basse-fréquence (diminution des marges de phase et de gain)
Avantages et inconvénients
Avantages :
- Élimine l'erreur statique pour une entrée en échelon (ajout d'un intégrateur dans la boucle ouverte)
- Simple à régler avec des méthodes comme Ziegler-Nichols.
Inconvénients :
- Peut ralentir la réponse transitoire (phénomène de dépassement ou d'oscillations).
- Peut déstabiliser le système en boucle fermée si les paramètres sont mal réglés.
Correcteur Proportionnel-Dérivateur (AP)
Fonction de transfert
La fonction de transfert d'un correcteur à avance de phase est donnée par :
avec
Diagramme de Bode
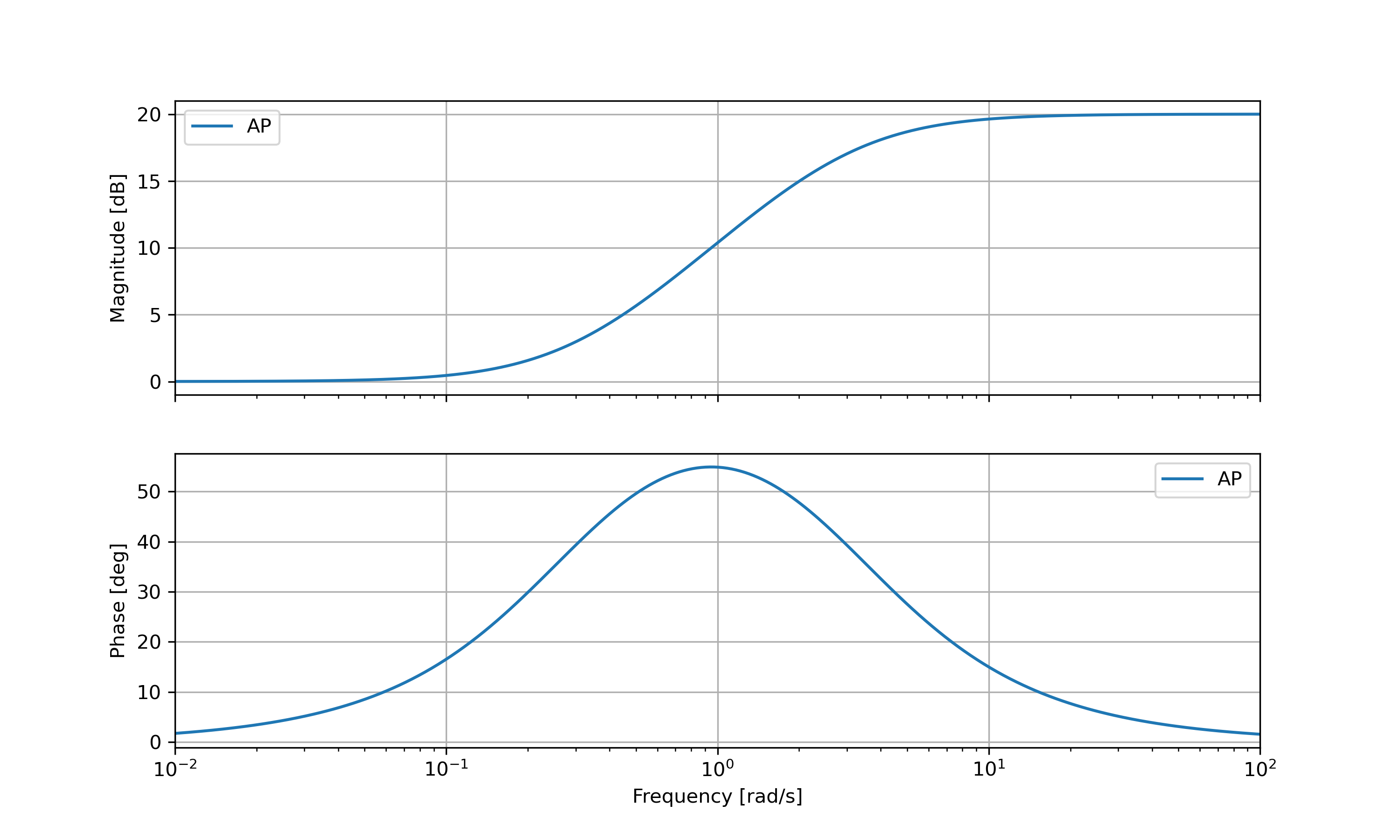
Le correcteur à avance de phase permet d'ajouter de la phase ce qui permet d'augmenter les marges de gain et de phase.
Avantages et inconvénients
Avantages :
- Augmente la marge de phase, améliorant la stabilité.
- Permet une réponse plus rapide en boucle fermée.
Inconvénients :
- Nécessite un réglage précis des constantes
et .
Correcteur Proportionnel-Dérivateur (PID)
Fonction de transfert
La fonction de transfert d'un correcteur proportionnel-intégral-dérivateur est donnée par :
: gain du correcteur proportionnel, : gain de l'action intégrale. : gain de l'action dérivée.
Diagramme de Bode
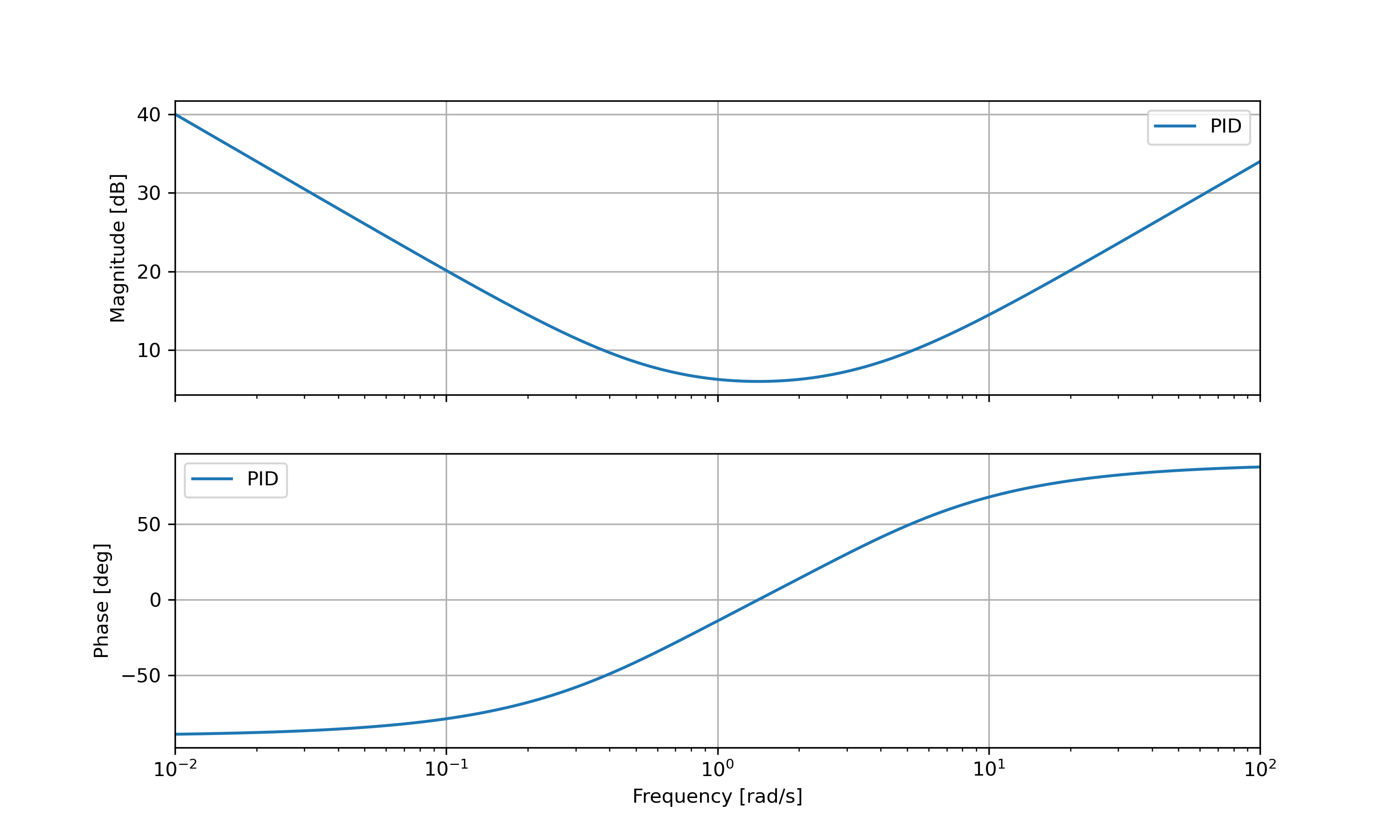
Lorsqu'il est bien réglé, un correcteur PID permet à la fois d'apporter du gain en basse-fréquence et d'ajouter de la phase en haute fréquence.
Avantages et inconvénients
Avantages :
- Combine les avantages des correcteurs P, I et D.
- Élimine l'erreur statique, améliore la stabilité et réduit les oscillations.
- Convient à une large gamme de systèmes.
Inconvénients :
- Plus complexe à régler (besoin de méthodes adaptées).
- Sensible au bruit (composante dérivée).