Transformée en Z
Cette section introduit la transformée en Z comme outil central pour simplifier l'analyse des systèmes linéaires invariants dans le temps (SLIT) à temps discret. Après la définition et les principales propriétés (linéarité, décalage temporel, convolution, théorèmes des valeurs initiale et finale), on présente les signaux usuels et leurs transformées. Ce chapitre constitue l'équivalent discret de la transformée de Laplace utilisée pour les systèmes à temps continu.
Définition
La transformée en Z est un outil mathématique fondamental pour l'analyse des systèmes à temps discret. Elle joue un rôle analogue à celui de la transformée de Laplace pour les systèmes à temps continu, permettant de convertir des équations de récurrence en équations algébriques.
La transformée en Z unilatérale d'une suite numérique
où
La transformée en Z d'un signal ne converge pas nécessairement pour tout
Exemple
À titre d'exemple, nous allons déterminer la transformée en Z de l'échelon unité
Cette série est une série géométrique de raison
La transformée en Z de l'échelon unité est donc :
Propriétés
La transformée en Z possède plusieurs propriétés qui permettent de simplifier l'analyse des systèmes linéaires et invariants dans le temps.
1. Linéarité
La transformée en Z est une opération linéaire :
où
Démonstration
Pour démontrer cette propriété, nous appliquons la définition de la transformée en Z :
2. Décalage temporel (retard)
Si
Cette propriété est fondamentale pour l'analyse des systèmes discrets car elle permet de traiter les retards de manière algébrique.
Démonstration
En utilisant la définition de la transformée en Z et en posant
3. Avance temporelle
Si
Plus généralement, pour une avance de
Lorsque les conditions initiales sont nulles (
4. Multiplication par une exponentielle
Si
Démonstration
5. Convolution
Si
Cette propriété est fondamentale : la convolution dans le domaine temporel devient un simple produit dans le domaine en Z.
6. Théorème de la valeur initiale
Si la limite
Démonstration
car tous les termes avec
7. Théorème de la valeur finale
Si tous les pôles de
Signaux Usuels
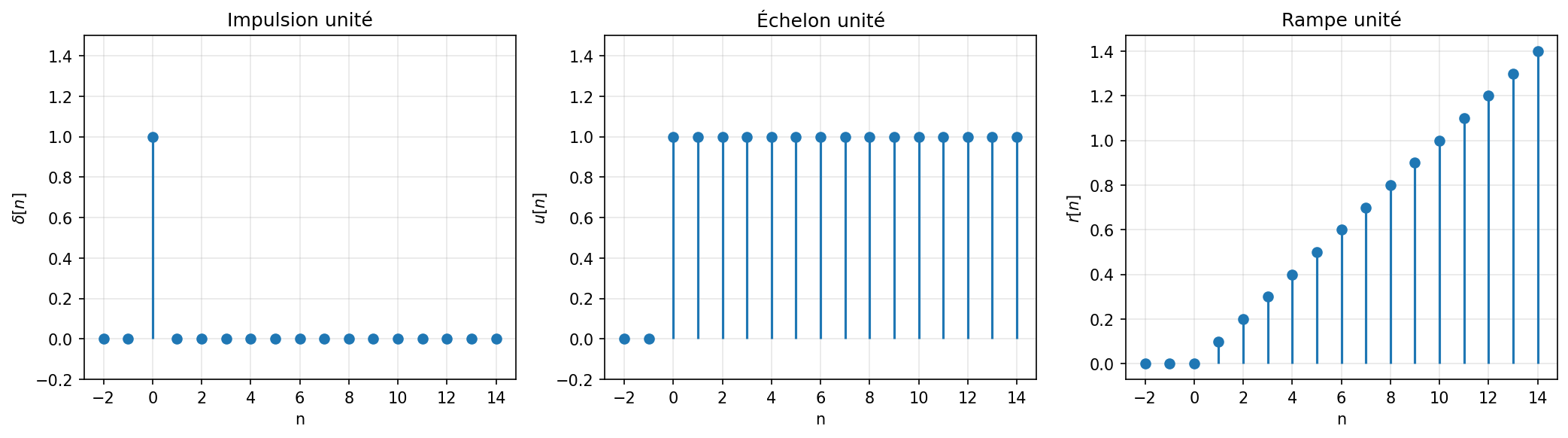
La figure suivante illustre les trois signaux discrets usuels : l'impulsion unité, l'échelon unité et la rampe unité.
Impulsion unité (delta de Kronecker)
Définition :
Transformée en Z :
Démonstration
Échelon unité
Définition :
Transformée en Z :
Rampe unité
Définition :
Transformée en Z :
Exponentielle discrète
Définition :
Transformée en Z :
La figure suivante illustre le comportement de l'exponentielle discrète
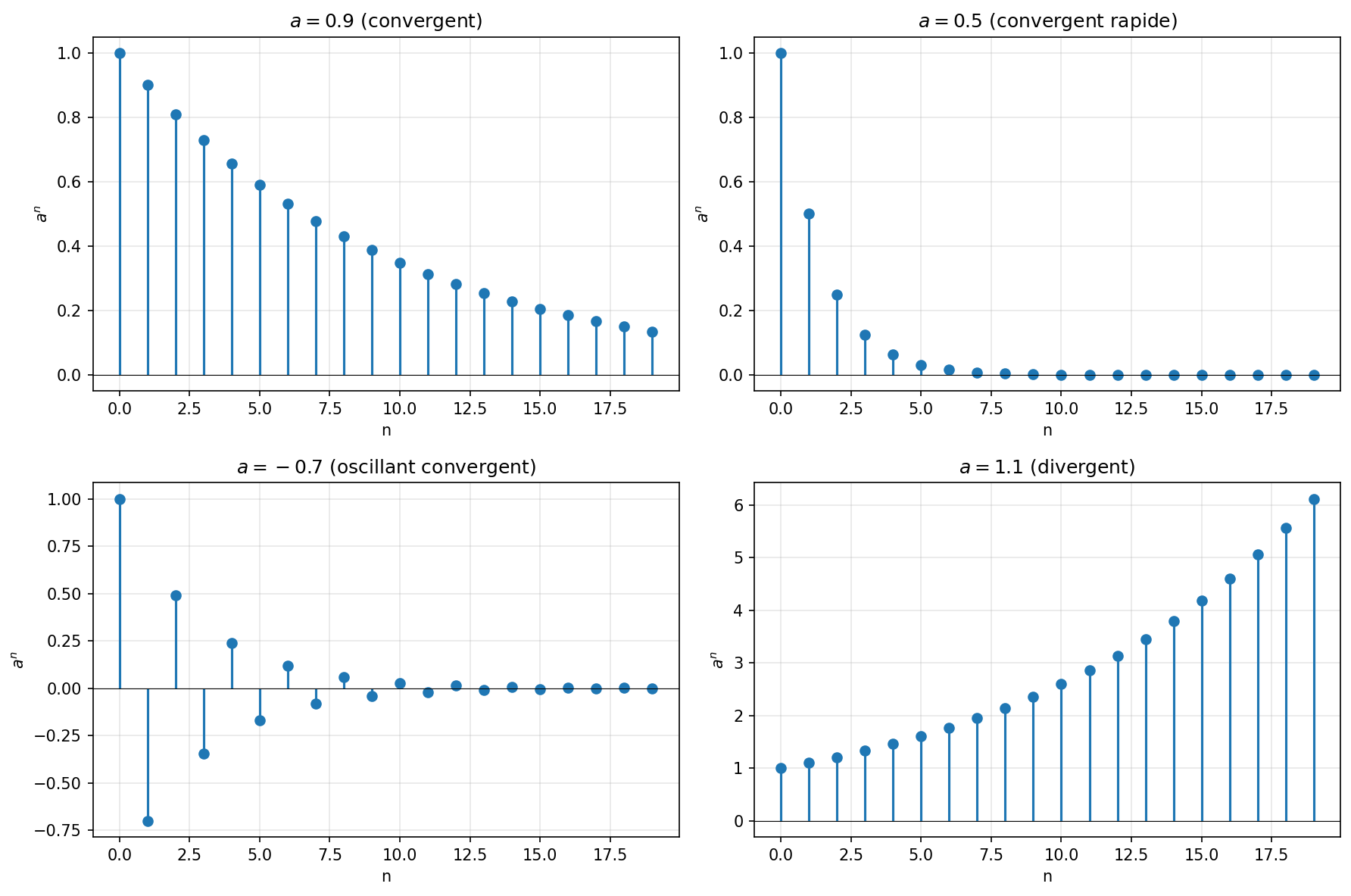
Démonstration
Cette série géométrique converge pour
Table des transformées en Z usuelles
| Signal | Transformée | ROC |
|---|---|---|
| Tout | ||