Analyse des SLIT
Dans ce cours, nous nous intéressons spécifiquement à l'analyse des Systèmes Linéaires Invariants dans le Temps (SLIT) discrets modélisables par une équation de récurrence.
Équation de récurrence
Expression
Lorsqu'un système est modélisable par une équation de récurrence, le lien entre l'entrée
Lorsque le système est causal,
Fonction de transfert
Lorsque les conditions initiales sont nulles, la transformée en Z de la sortie s'exprime sous la forme

Forme polynomiale
Pour un système régi par une équation de récurrence, la fonction de transfert du système est donnée par :
Forme Factorisée
Pour mettre en évidence les points singuliers de la fonction de transfert, il est possible de réexprimer la fonction de transfert sous une forme factorisée :
- les
correspondent aux zéros de la fonction de transfert, - les
correspondent aux pôles de la fonction de transfert, est un facteur d'amplification.
Propriétés
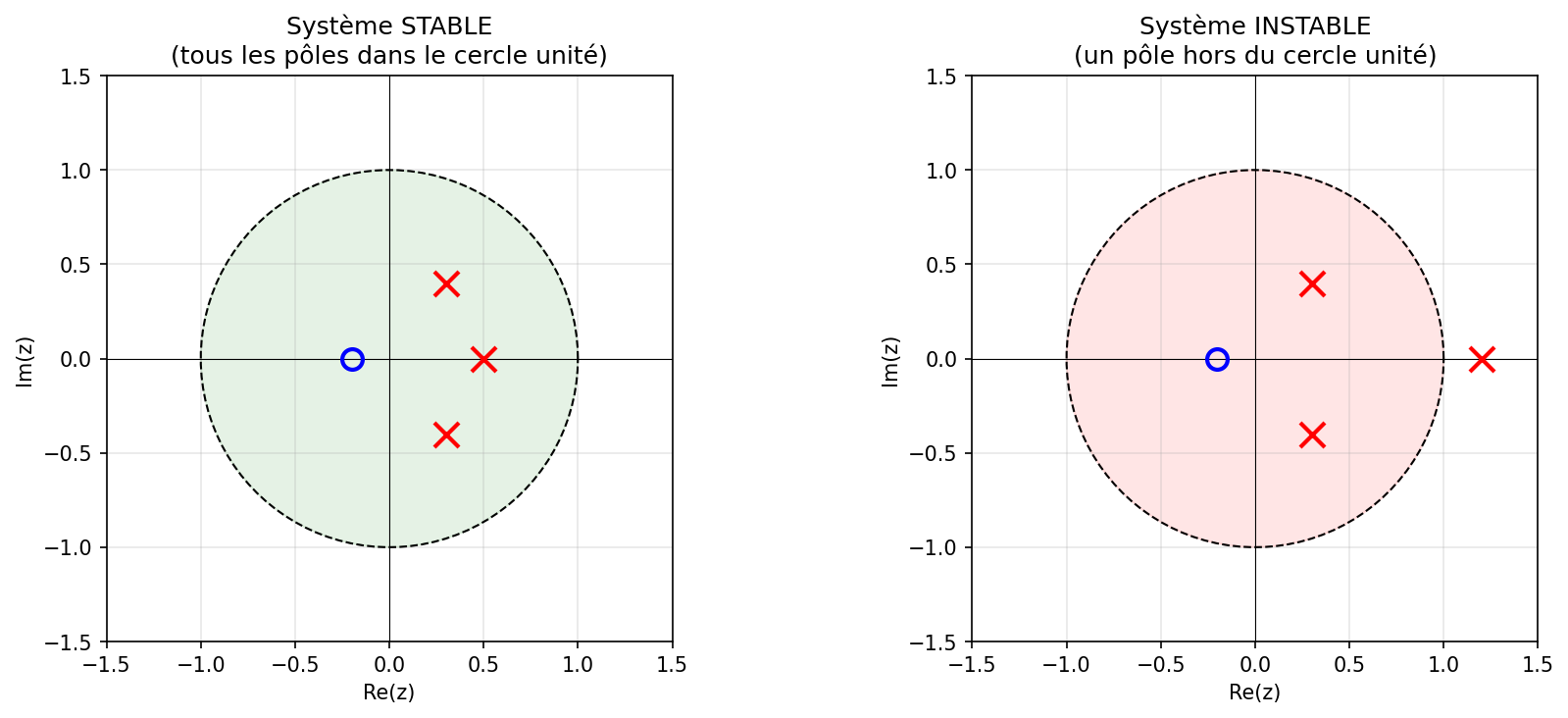
Stabilité : Pour qu'un système à temps discret soit stable, il faut que tous les pôles de sa fonction de transfert soient inclus dans le cercle de rayon unité, c'est-à-dire
Valeur Initiale :
Valeur Finale : Si la sortie converge,
Réponse Temporelle
Pour obtenir la réponse temporelle d'un système à une entrée
Technique 1 : Décomposition en éléments simples
- Calcul de la transformée en Z de la sortie du système, c'est-à-dire
où correspond à la transformée en Z de l'entrée. - Décomposition en éléments simples de la sortie
, puis de . - Retour à l'original en appliquant la transformée en Z inverse (utilisation des tables des transformées en Z).
Technique 2 : Équation de récurrence
- Obtention de l'équation de récurrence donnant
en fonction de et - Évaluation de la sortie
en remplaçant les par leur valeur numérique.
Exemple
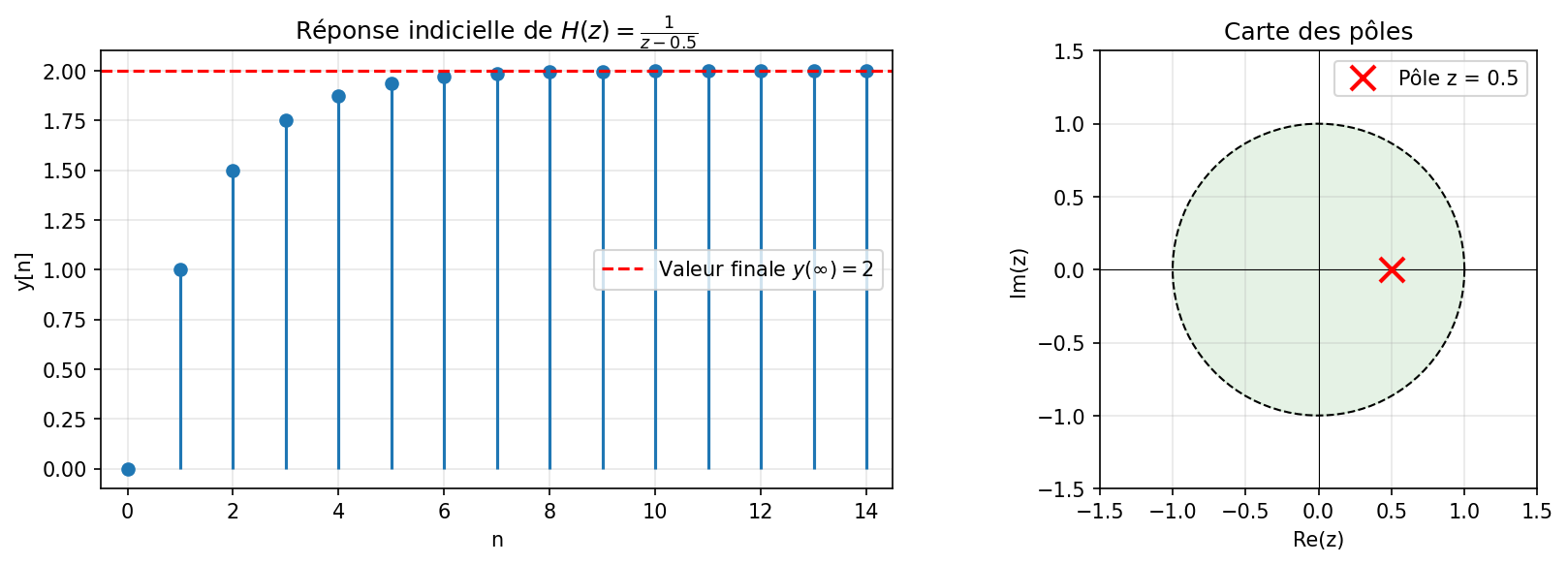
Considérons un système de premier ordre défini par la fonction de transfert :
Les paragraphes suivants montrent comment obtenir la réponse indicielle à un échelon d'amplitude
Technique 1
- Transformée en Z de la sortie :
- Décomposition en éléments simples :
- Retour à l'original :
À titre d'exemple pour
Technique 2
- Équation de récurrence :
Nous obtenons alors :
- Évaluation de la sortie
:
À titre d'exemple pour
Réponse Fréquentielle
Expression
Il est possible de montrer que si
La réponse fréquentielle peut s'obtenir directement à partir de la fonction de transfert en posant :
Compte tenu des propriétés de périodicité et de symétrie, la réponse fréquentielle est le plus souvent déterminée pour
Représentation
Comme la réponse fréquentielle est généralement complexe, nous représentons le plus souvent :
- son module
, souvent exprimé en décibels (dB) : - son argument
, exprimé en degrés ou en radians.
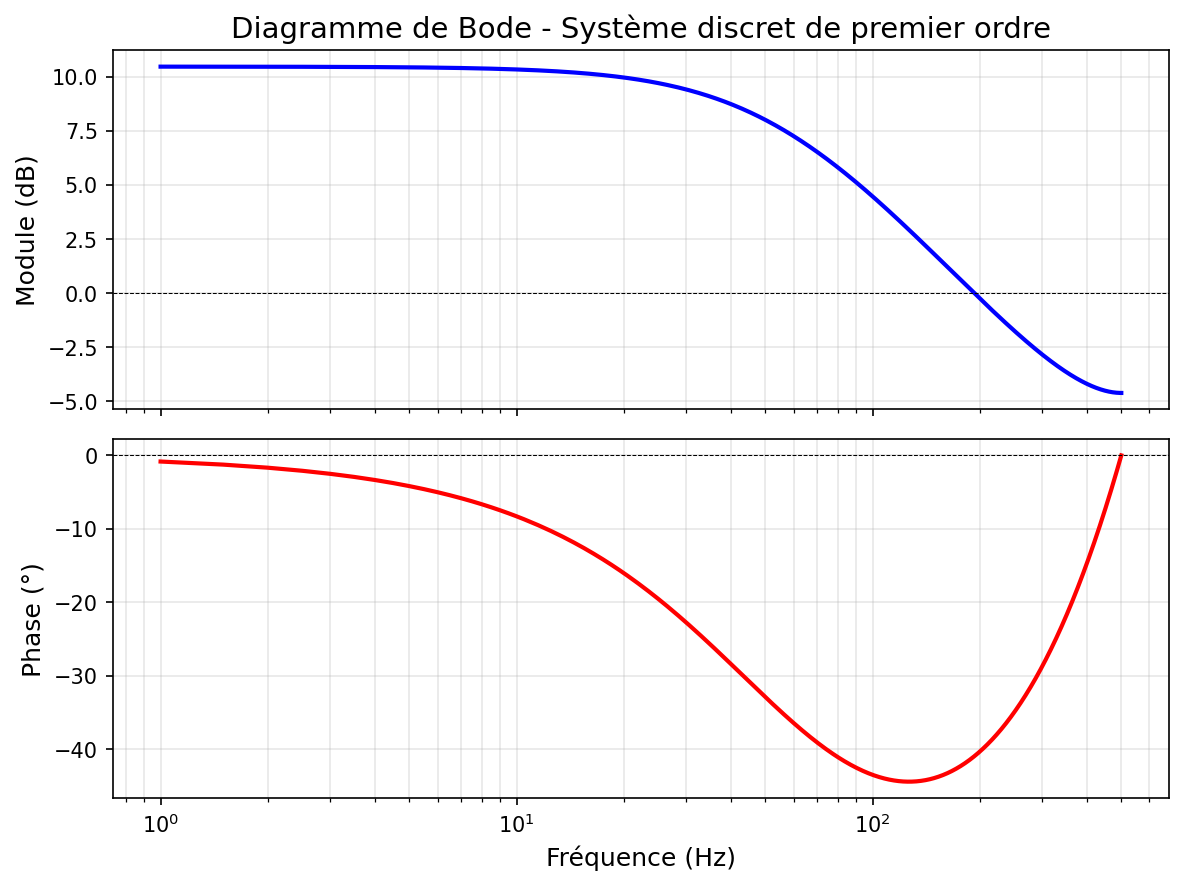
Ces deux grandeurs sont représentées sur un diagramme de Bode, avec une échelle logarithmique en fréquence.
Exemple
Considérons un système discret de premier ordre de fonction de transfert :
La réponse fréquentielle s'obtient en posant
Module
En utilisant
Le module de la réponse fréquentielle est donc :
Argument
L'argument de la réponse fréquentielle s'obtient par :