Correspondance Continu/Discret
Ce chapitre présente la correspondance entre le plan de Laplace (plan
Relation fondamentale
Expression
La relation entre un pôle continu
où
Interprétation
En posant
Cette expression peut s'écrire sous forme polaire :
avec :
- Module :
- Argument :
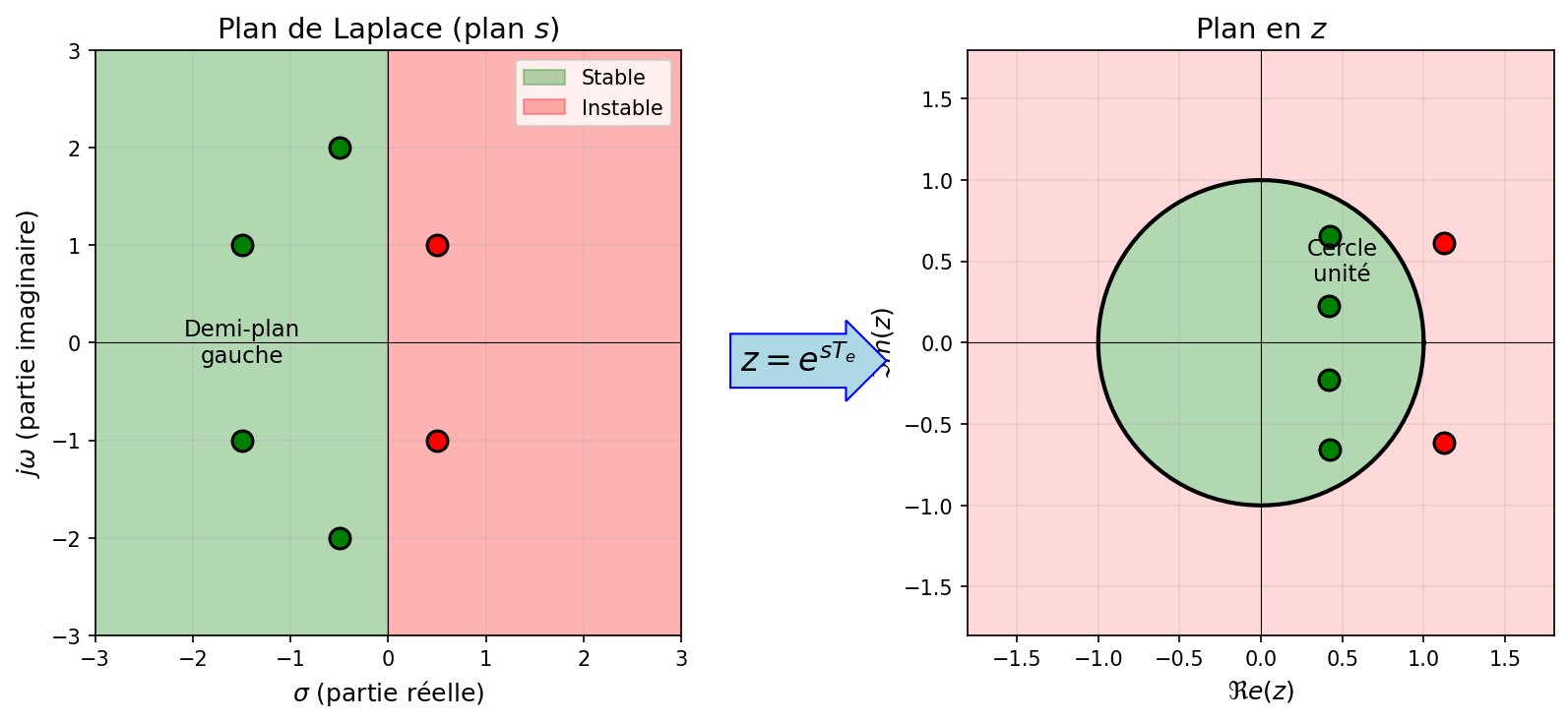
Correspondance des régions de stabilité
Plan de Laplace (plan
Dans le plan
Plan en
Dans le plan
Démonstration de la correspondance
Si
Le pôle discret est donc à l'intérieur du cercle unité.
Inversement, si
Correspondance des régions
| Plan | Plan | Stabilité |
|---|---|---|
| Demi-plan gauche ( | Intérieur du cercle unité ( | Stable |
| Axe imaginaire ( | Cercle unité ( | Marginalement stable |
| Demi-plan droit ( | Extérieur du cercle unité ( | Instable |
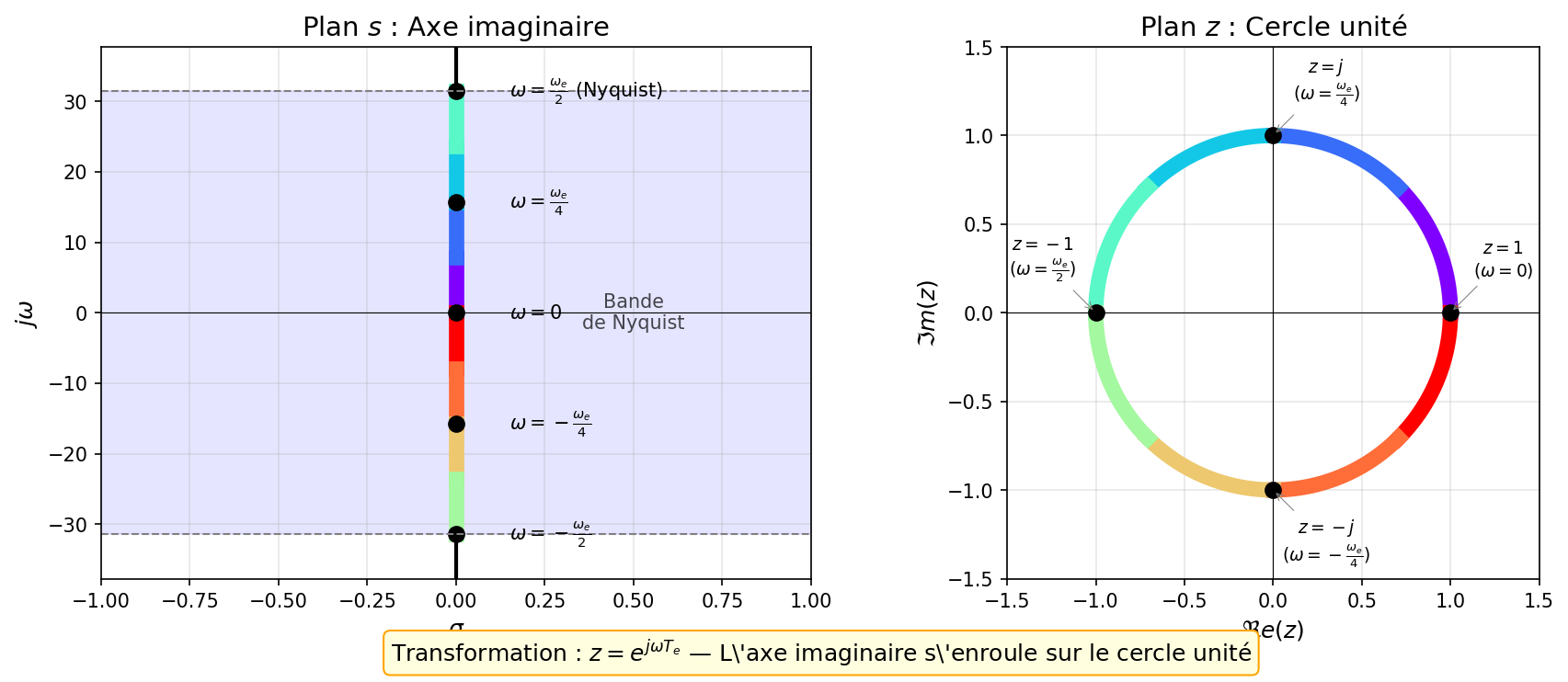
Correspondance de l'axe des fréquences
Axe imaginaire du plan
L'axe imaginaire du plan
Cette expression décrit le cercle unité dans le plan
Périodicité
La correspondance
Cela signifie que toutes les fréquences séparées de
Points remarquables
| Pulsation continue | Position sur le cercle unité |
|---|---|
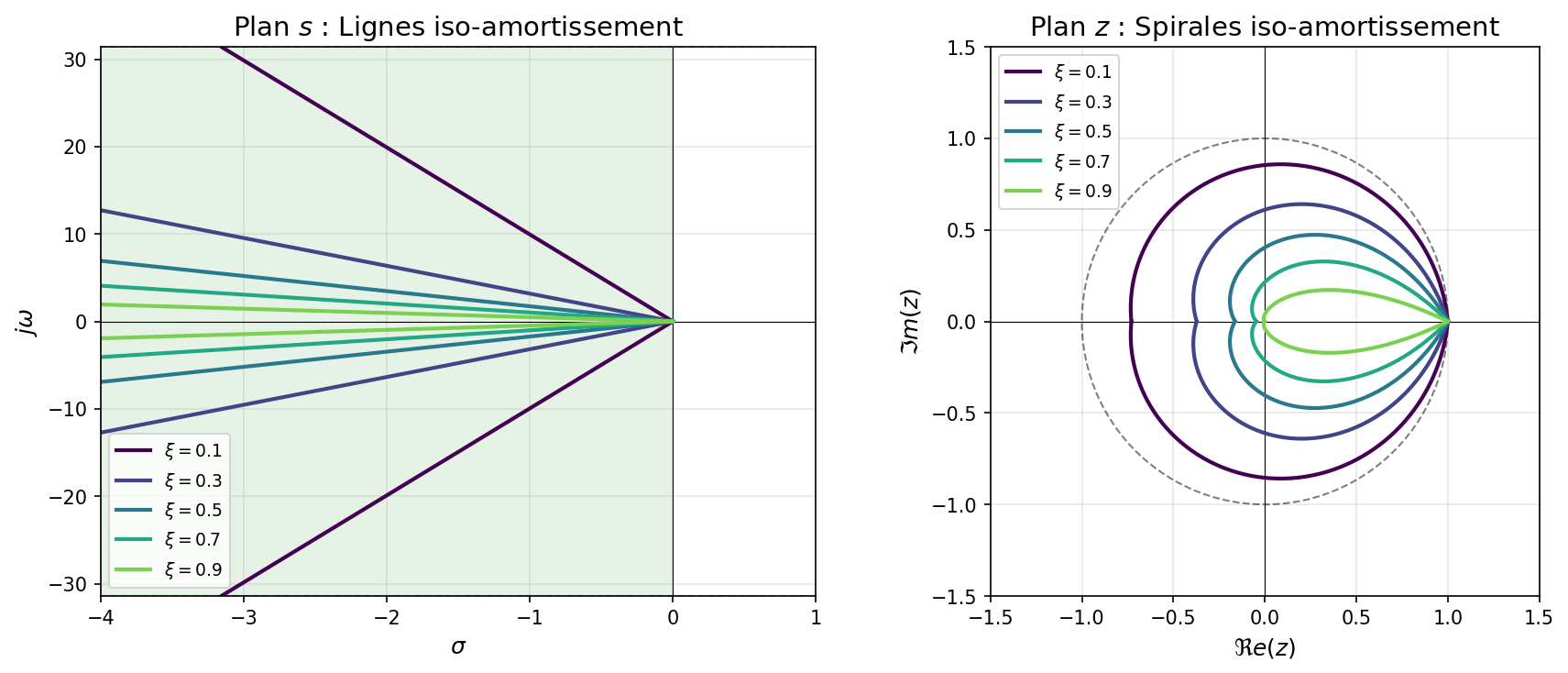
Lignes iso-amortissement
Dans le plan
Les lignes d'amortissement constant
Pour un pôle sur cette ligne :
Le rapport
Dans le plan
En appliquant la transformation
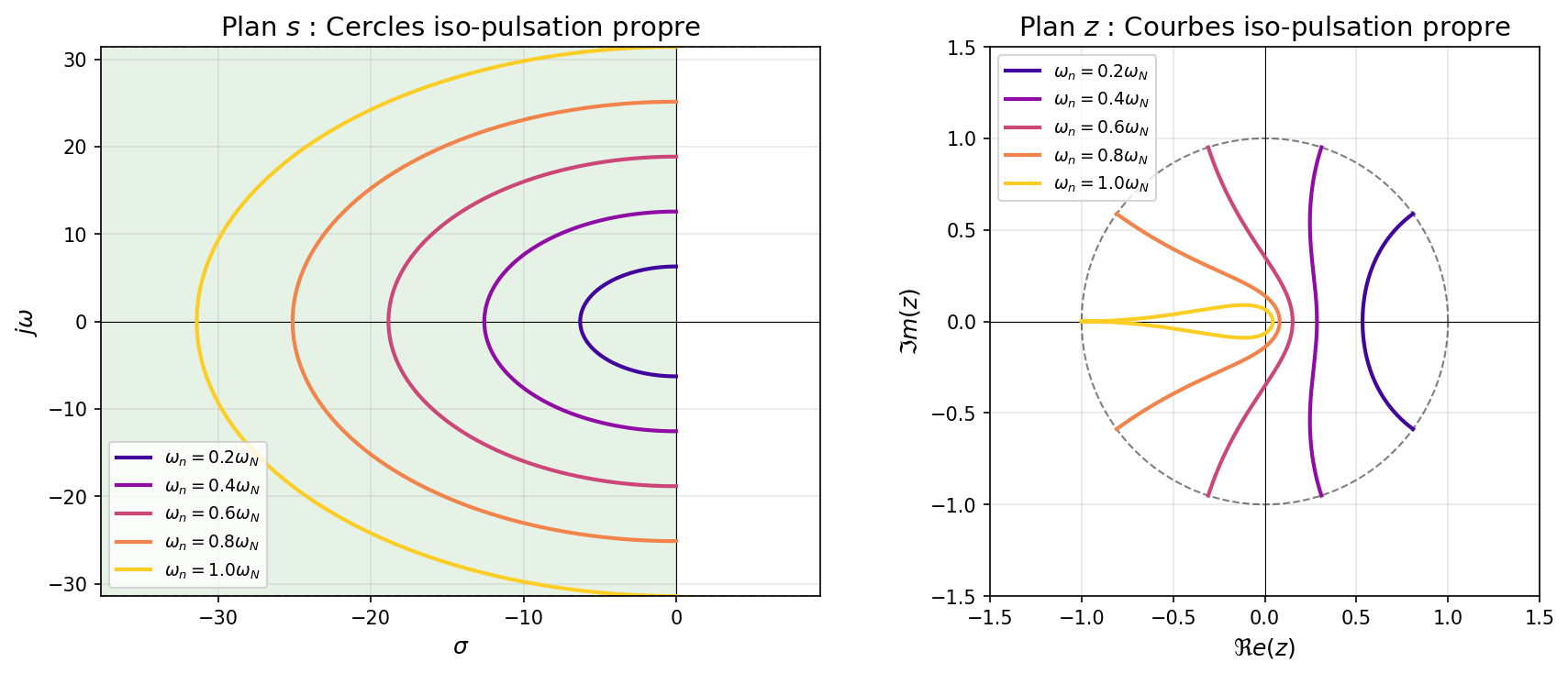
Lignes iso-pulsation propre
Dans le plan
Les lignes de pulsation propre constante
Dans le plan
Ces demi-cercles se transforment en courbes fermées dans le plan
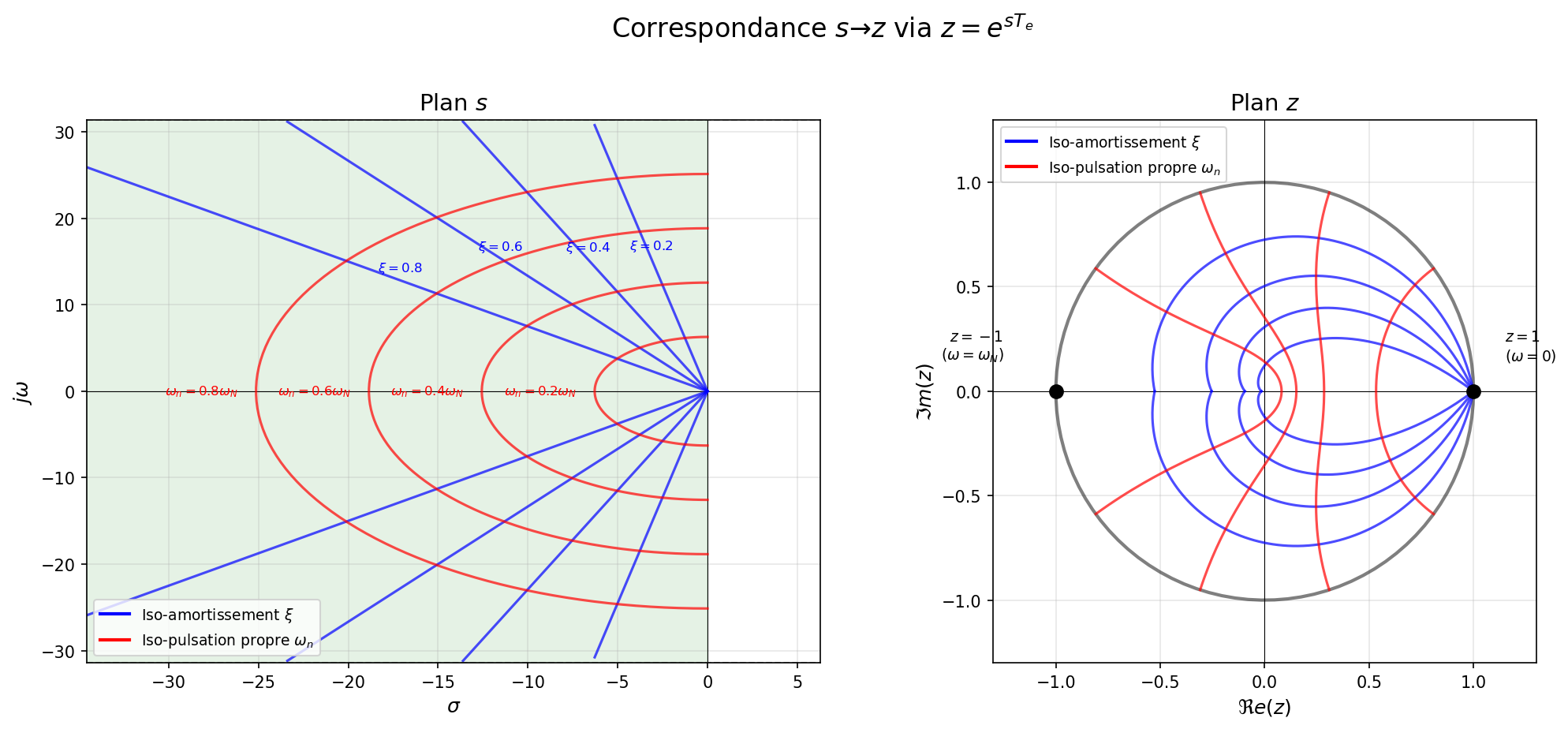
Grille complète de correspondance
La figure suivante présente une vue d'ensemble de la correspondance entre le plan
Implications pratiques
Choix de la période d'échantillonnage
La correspondance
Si
est trop grand : les pôles rapides (grande partie imaginaire) se retrouvent repliés, et la dynamique du système n'est pas correctement capturée. Si
est trop petit : les pôles discrets se rapprochent de , ce qui peut poser des problèmes de précision numérique.
Règle pratique
Pour un système de constante de temps dominante
Cela correspond à 5 à 20 échantillons par constante de temps.
Placement des pôles
Lors de la conception d'un correcteur numérique, il est souvent plus intuitif de :
- Spécifier les performances souhaitées dans le plan
(temps de réponse, dépassement) - Calculer les pôles continus correspondants
- Transformer ces pôles en pôles discrets via
Formules utiles
Pour un système de second ordre avec
Les pôles discrets correspondants sont :
En coordonnées polaires :