Numérisation des Correcteurs
Ce chapitre présente les techniques de numérisation permettant de convertir un correcteur analogique
Principe
La numérisation consiste à trouver une fonction de transfert discrète
Méthodes de numérisation
Méthode d'Euler avant (Forward Euler)
Cette méthode approxime la dérivée par une différence avant :
La substitution correspondante est :
Démonstration
Partant de
En appliquant la transformée en Z :
D'où la correspondance
Stabilité
Cette méthode ne préserve pas la stabilité. Un système continu stable peut devenir instable après numérisation par Euler avant.
Méthode d'Euler arrière (Backward Euler)
Cette méthode approxime la dérivée par une différence arrière :
La substitution correspondante est :
Démonstration
En approximant la dérivée par :
En appliquant la transformée en Z :
D'où la correspondance
Stabilité
Cette méthode préserve la stabilité. Un système continu stable reste stable après numérisation.
Méthode de Tustin (Bilinéaire)
La méthode de Tustin est la plus utilisée en pratique. Elle repose sur l'approximation trapézoïdale de l'intégrale :
Démonstration
L'intégration numérique par la méthode des trapèzes donne :
En appliquant la transformée en Z :
Comme l'intégrateur continu a pour fonction de transfert
Avantages de Tustin
- Préserve la stabilité : un pôle stable en
donne un pôle stable en - Bonne approximation fréquentielle pour les basses fréquences
- Méthode standard en automatique numérique
Correspondance des pôles
La relation entre un pôle continu
| Méthode | Substitution | Correspondance des pôles |
|---|---|---|
| Euler avant | ||
| Euler arrière | ||
| Tustin | ||
| Exacte (BOZ) | - |
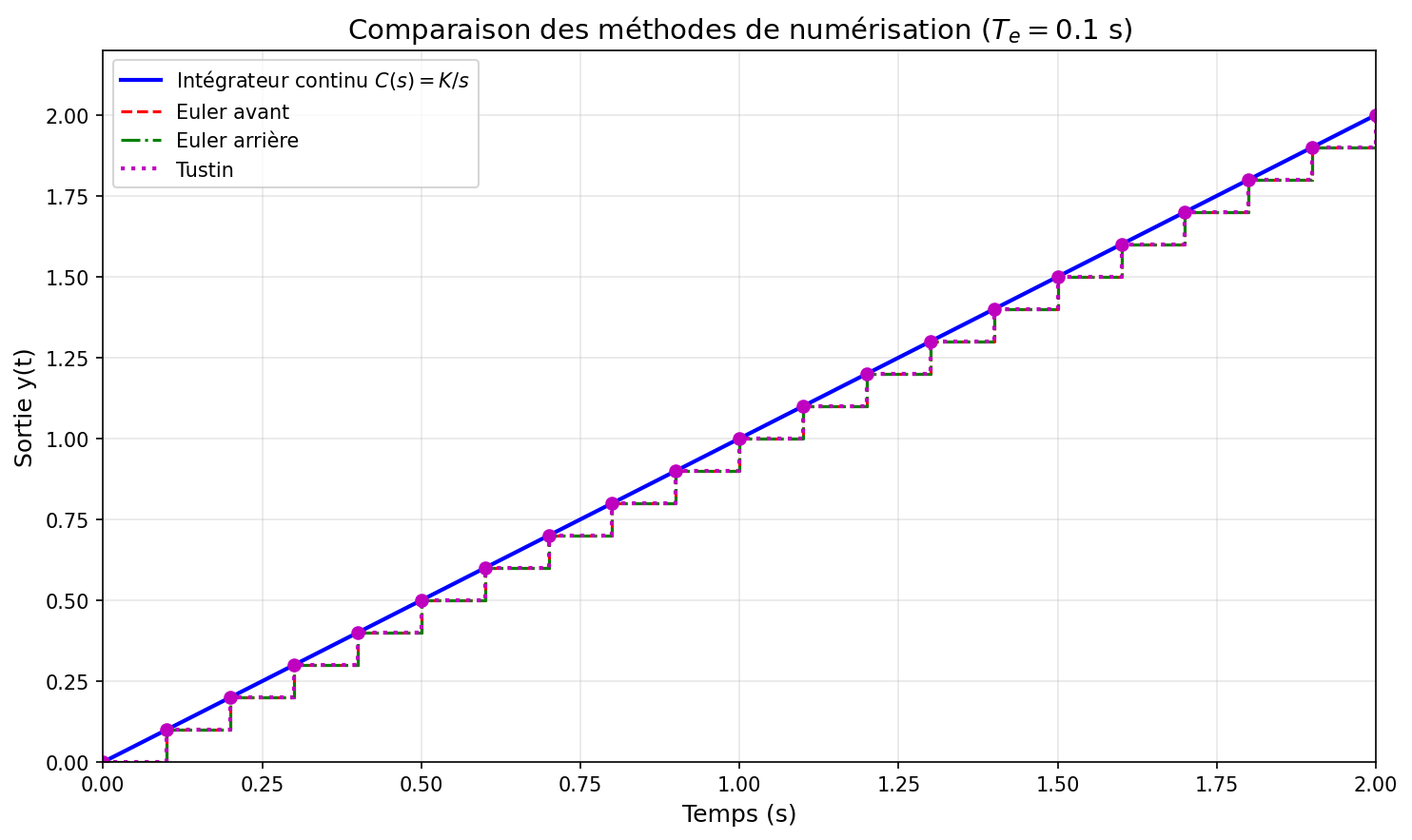
Exemple : Numérisation d'un intégrateur
Soit l'intégrateur
Méthode d'Euler avant :
Méthode d'Euler arrière :
Méthode de Tustin :
Exemple : Numérisation d'un premier ordre
Soit le correcteur de premier ordre
Méthode de Tustin :
En substituant
En posant
Le pôle discret est
Choix de la méthode
| Critère | Euler avant | Euler arrière | Tustin |
|---|---|---|---|
| Stabilité | Non garantie | Garantie | Garantie |
| Précision BF | Moyenne | Moyenne | Bonne |
| Complexité | Faible | Faible | Moyenne |
| Usage | Déconseillé | Acceptable | Recommandé |
Recommandation
En pratique, la méthode de Tustin est recommandée pour la numérisation des correcteurs. Elle offre le meilleur compromis entre précision et préservation de la stabilité.